从投影、正交补角度证明(推导)最小二乘法公式
学习线性回归的时候,会教我们$X\theta=y$可以直接用最小二乘法直接把$\theta$求出来:
$\theta=(X^TX)^{-1}X^Ty$
并且还在我之前的博文里直接应用了一番(那是根据公式来应用,即如何构建正确的A和y,从而应用公式直接求解$\theta$),里面还引了一篇详实的证明文章。
首先,在吴恩达的教材里,这个并不叫最小二乘(least suqare),而是叫Normal Equation method,这个不重要,毕竟在可汗学院的教材里,又叫最小二乘了^^。今天补充的内容,就是在回顾之前的笔记的时候,发现了大量的证明和应用这个公式的地方,而且全是在引入了投影(Projection)概念之后。因为那个时候并没有接触机器学习,看了也就看了,现在看到了应用场景,那就闭环了,回顾一下:
首先,预备知识
子空间
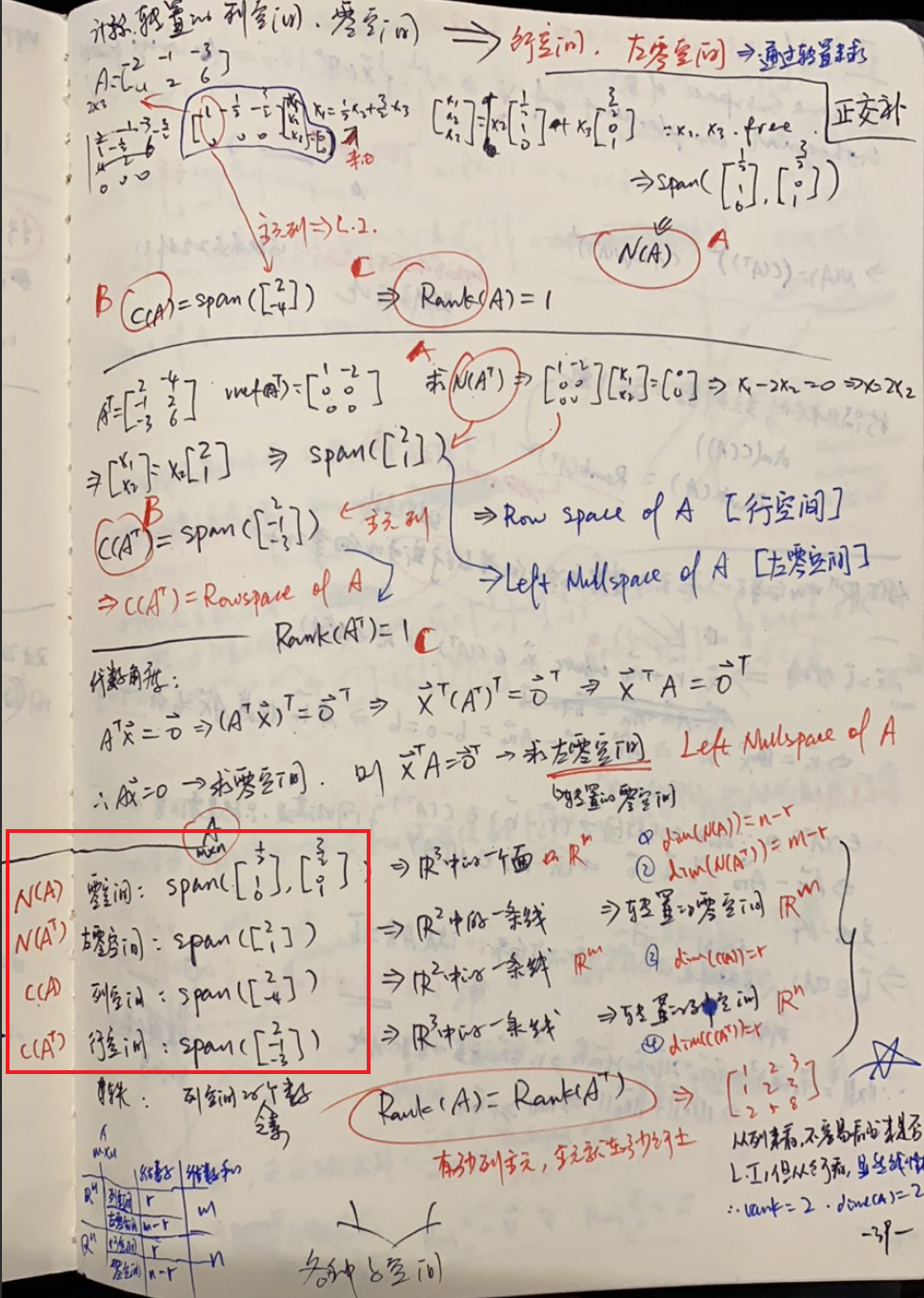
笔记很清楚了,对于一个矩阵
$A= \begin{bmatrix}
-2 & -1 & -3 \
4 & 2 & 6 \
\end{bmatrix}$ 它的列空间是自然是C(A),行空间自然是A的转置的后的列空间,然后各自拥有一个对应的零空间(即求解$Ax=0, A^Tx=0)$
上图用红框框出来的部分即是具体这个矩阵$A$的四个子空间。同时,拥有如下性质:
- $C(A)$与$N(A^T)$正交(
orthogonal),即列空间与左零空间正交 - $C(A^T)$与$N(A)$正交,即行空间与零空间正交
正交补
$V^\bot = {\vec x \in \R^n | \vec x \cdot \vec{v} = 0; for; every\ \vec{v} \in V \text{}}$ 即V的正交补为垂直于V内任意一个向量的所有向量。
那么:
- $C(A) = (N(A^T))^\bot$
- $C(A^T) = (N(A))^\bot$
投影是一个线性变换
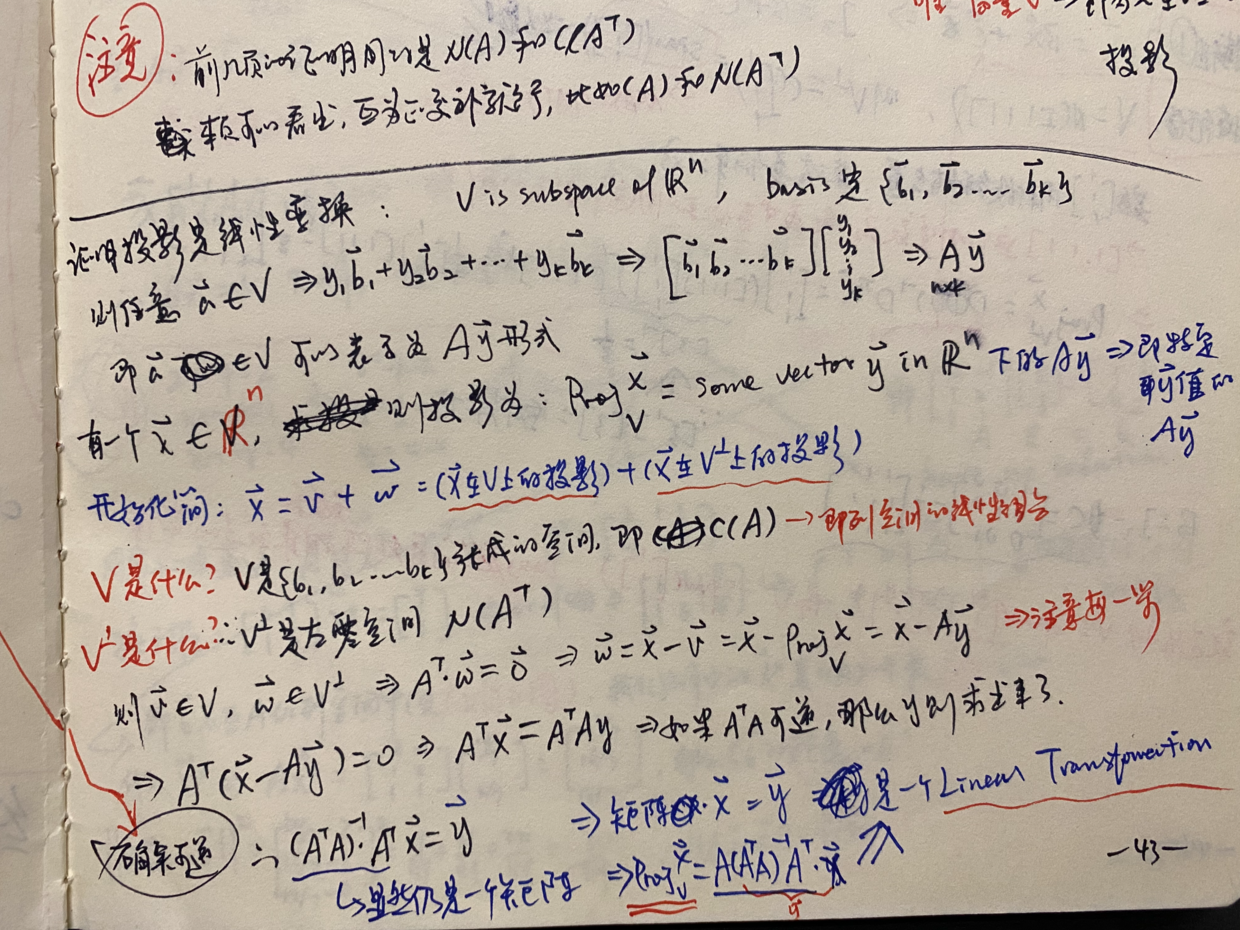
- $\vec x$在$V \in \R^n$上的投影$Proj_V^{\vec x} = \vec v$必然能表示成该空间的
basis{$\vec b_1, \vec b_2, \vec b_3, \dots$}的线性变换:$\vec v \in V = y_1\vec b_1 + y_2\vec b_2 + \cdots + y_k \vec b_k = A\vec y$ - 求出$\vec y$则求出了这个投影在哪里
- $\vec x$能向$V$投影,自然也能向$V^\bot$投影($\vec w$)
- 这里是故意这么说的,强调都是投影,其实在向$V$投影时,在$V^\bot$的投影($\vec w$)就是那条垂线
- $V \Rightarrow C(A),; V^\bot \Rightarrow N(A^T), \vec v \in V, \vec w \in V^\bot$
- 左零空间只不过是转置的零空间,那么零空间的特性是什么呢?即$A\vec x = 0$的空间,那么$\vec w$在左零空间里,意味着: $A^T\vec w = 0$
- $\vec w = \vec x - \vec v = \vec x - A\vec y \Rightarrow A^T(\vec x - A\vec y) = 0 \Rightarrow A^T \vec x = A^TA\vec y$
- 只要$A^TA$可逆的话: $\Rightarrow \vec y= (A^TA)^{-1}A^T\vec x$
- $\therefore Proj_V^{\vec x} = A\vec y = A(A^TA)^{-1}A^T\vec x$
- 得证$\vec x$在$V$上的投影就是一个线性变换
- $\vec y$即是机器学习中我们需要学习到的系数 = $(A^TA)^{-1}A^T$
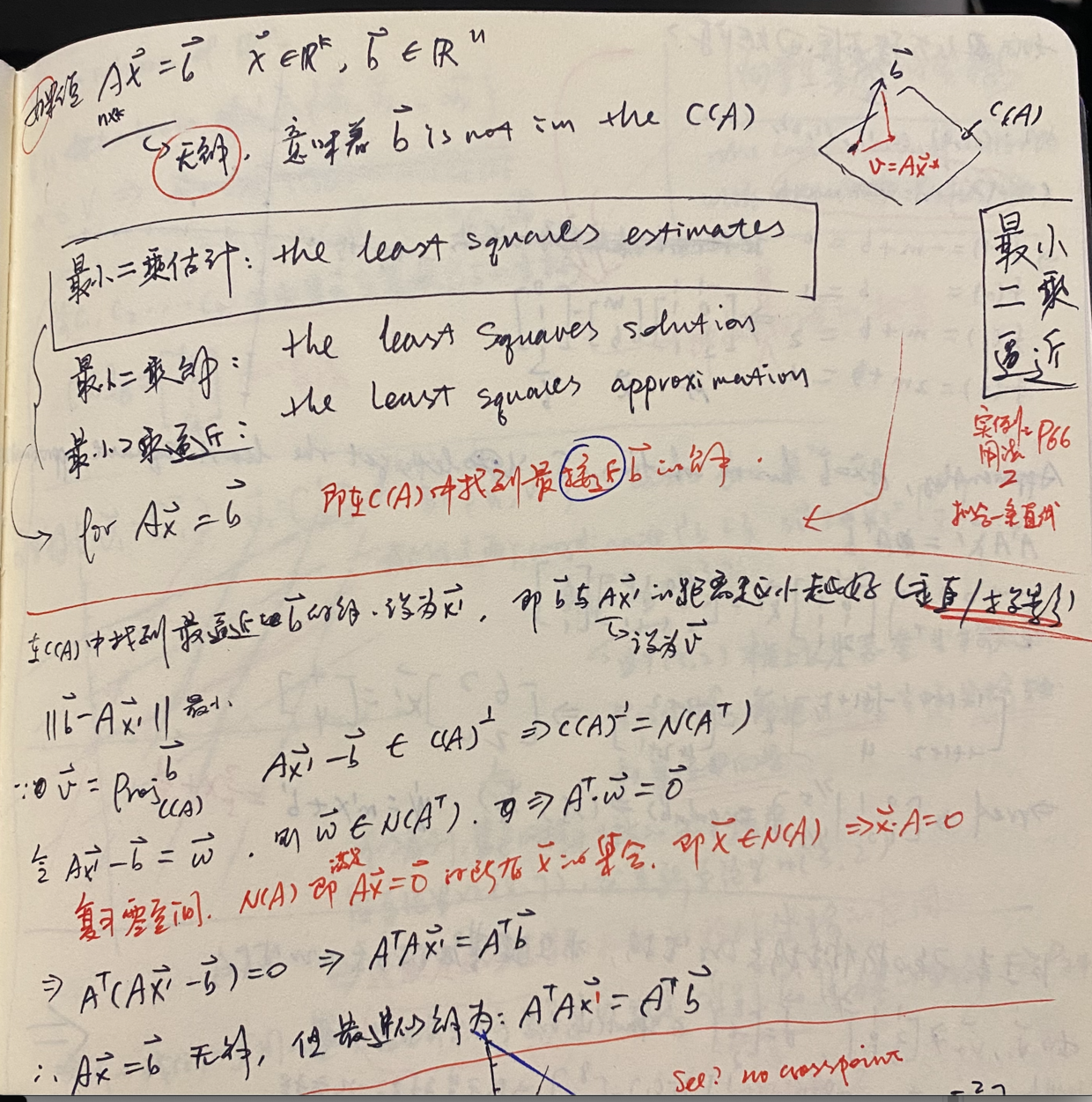
最小二乘逼近
由此到了下一课,the lease squares approximation,讲的就是$A\vec x = \vec b$无解时,意思就是在$\vec b$不存在A的张成子空间中,所以无论进行怎样的线性变换,都是不可能得到$\vec b$的,则取$\vec x$在$C(A)$中的投影作为近似的解(证明就不再展开了)
应用最小二乘拟合一条回归线
这里终于讲到了与机器学习最接近的内容:regression
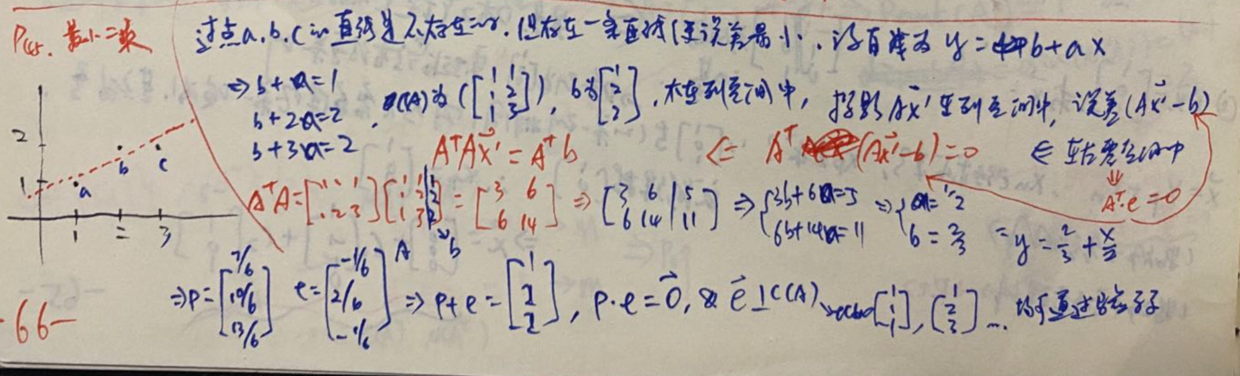
这个回归实例里,因为需要拟合的是一条直线:$y = b + ax$,那么既有的数据就成了机器学习里的“样本”,但我们这里不需要这么理解,而是直接理解为矩阵,得到 方程组:
$$\begin{cases} b + a = 1 \\ b + 2a = 2 \\ b + 3a = 2 \end{cases}$$
提取矩阵:
$$A = \begin{bmatrix}1&1\\1& 2\\ 1& 3\end{bmatrix}, \vec b = \begin{bmatrix}1\\2\\ 2\end{bmatrix} \Rightarrow A\vec x = \vec b$$
好了,在上面提到的这篇博文里,我们不明就里地直接用了公式,已知A和b求变换矩阵M(即这里的$\vec x$),还当成是机器学习的内容,而现在我们已经知道自己是在做什么,就是找b在$A$的张成子空间里的投影,就能得到最近似的解
$$\vec x \approx (A^TA)^{-1}A^T\vec b$$