李宏毅Machine Learning 2021 Spring笔记[2]
Optimization
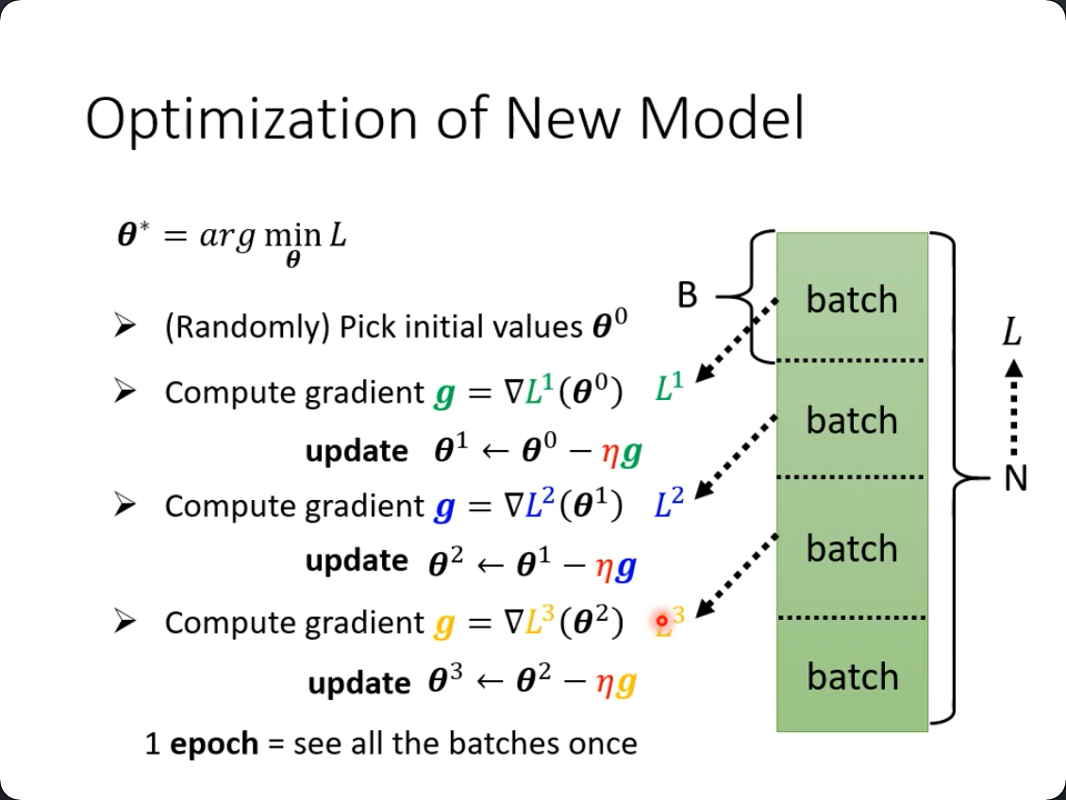
真实世界训练样本会很大,
- 我们往往不会把整个所有数据直接算一次loss,来迭代梯度,
- 而是分成很多小份(mini-batch)每一小份计算一次loss(然后迭代梯度)
- 下一个小batch认前一次迭代的结果
- 也就是说,其实这是一个不严谨的迭代,用别人数据的结果来当成本轮数据的前提
- 最准确的当然是所有数据计算梯度和迭代。
- 一定要找补的话,可以这么认为:
- 即使一个小batch,也是可以训练到合理的参数的
- 所以前一个batch训练出来的数据,是一定程度上合理的
- 现在换了新的数据,但保持上一轮的参数,反而可以防止
过拟合
minibatch还有一个极端就是batchsize=1,即每次看完一条数据就与真值做loss,这当然是可以的,而且它非常快。但是:
- 小batch虽然快,但是它非常noisy(及每一笔数据都有可能是个例,没有其它数据来抵消它的影响)
- 因为有gpu平行运算的原因,只要不是batch非常大(比如10000以上),其实mini-batch并不慢
- 如果是小样本,mini-batch反而更快,因为它一来可以平行运算,在计算gradient的时候不比小batch慢,但是它比小batch要小几个数量级的update.
仍然有个但是:实验证明小的batch size会有更高的准确率。
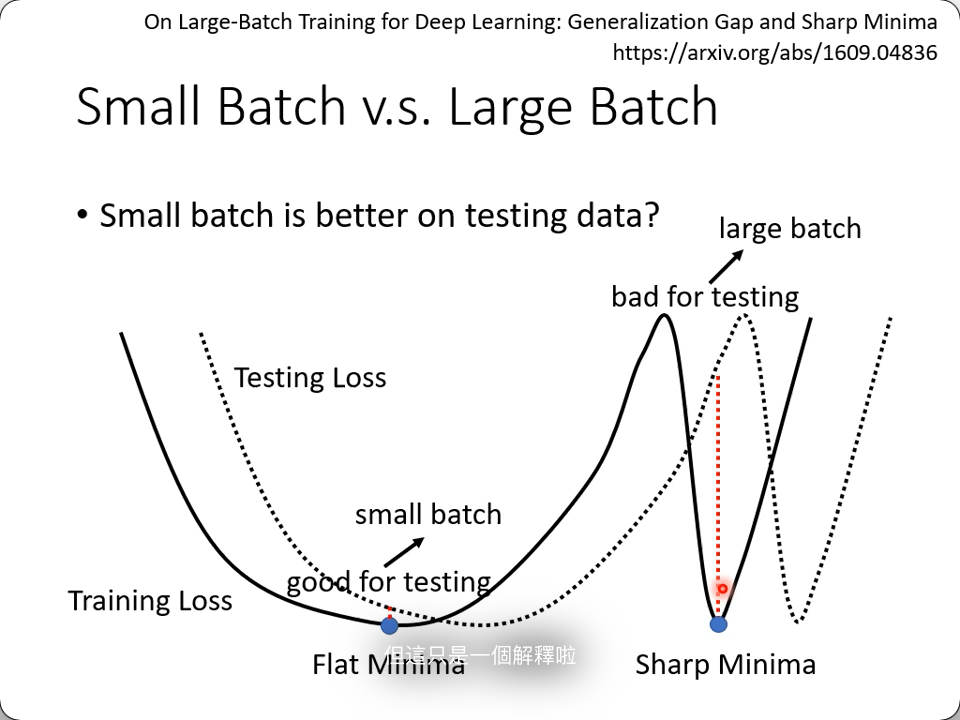
两个local minimal,右边那个认为是不好的,因为它只要有一点偏差,与真值就会有巨大的差异。但是没懂为什么大的batch会更容易落在右边。
这是什么问题?其实是optimization的问题,后面会用一些方法来解决。
Sigmoid -> RelU
前面我们用了soft的折线来模拟折线,其实还可以叠加两个真的折线(ReLU),这才是我一直说的整流函数的名字的由来。
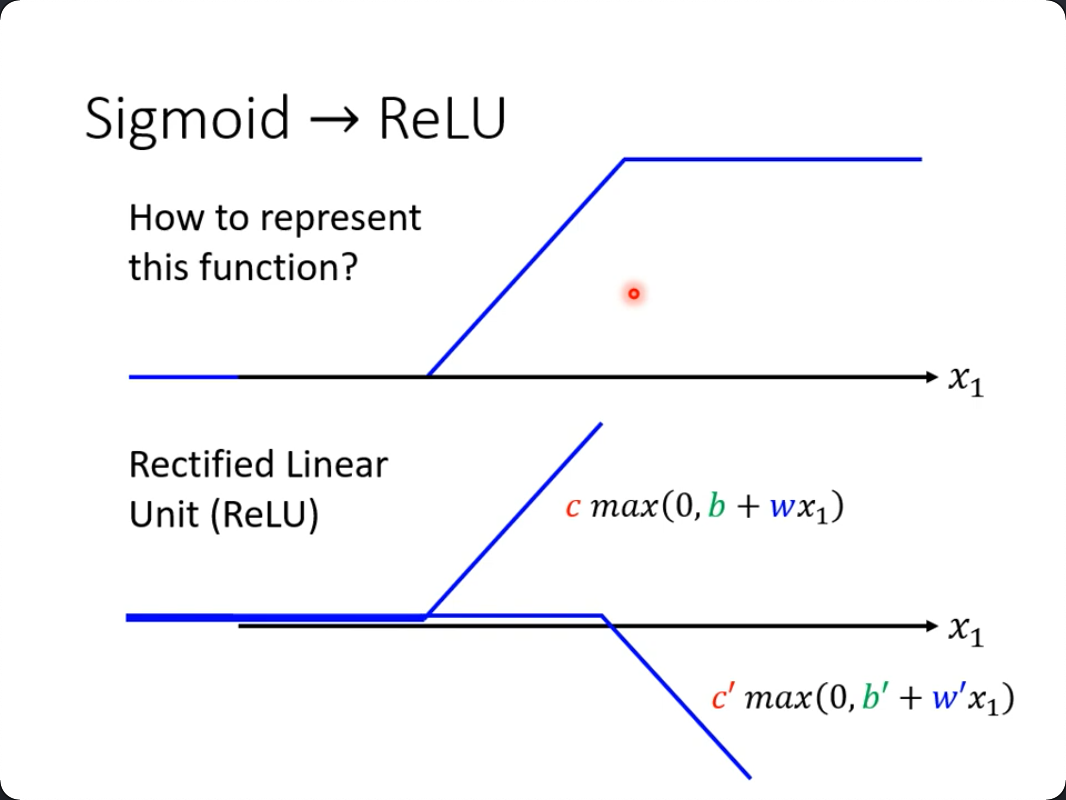
仔细看图,c和c'在第二个转折的右边,一个是向无穷大变,一个是向无穷小变,只要找到合理的斜率,就能抵消掉两个趋势,变成一条直线。
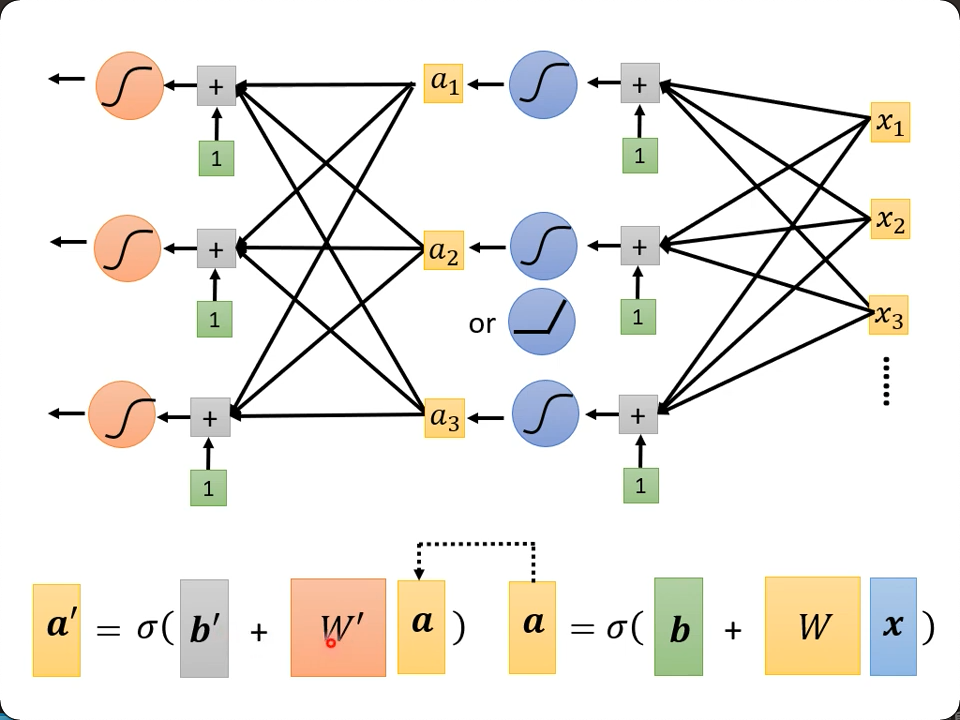
如果要用ReLU,那么简单替换一下:
- $y = b + \sum_i {\color{ccdd00}{c_i}} sigmoid(\color{green}{b_i} + \sum_j \color{blue}{w_{ij}} x_j)$
- $y = b + \sum_{\color{red}2i} {\color{ccdd00}{c_i}} \color{red}{max}(\color{red}0,\ \color{green}{b_i} + \sum_j \color{blue}{w_{ij}} x_j)$
红色的即为改动的部分,也呼应了2个relu才构成一个sigmoid的铺垫。
把每一个a当成之前的x,我们可以继续套上新的w,b,c等,生成新的a->a'
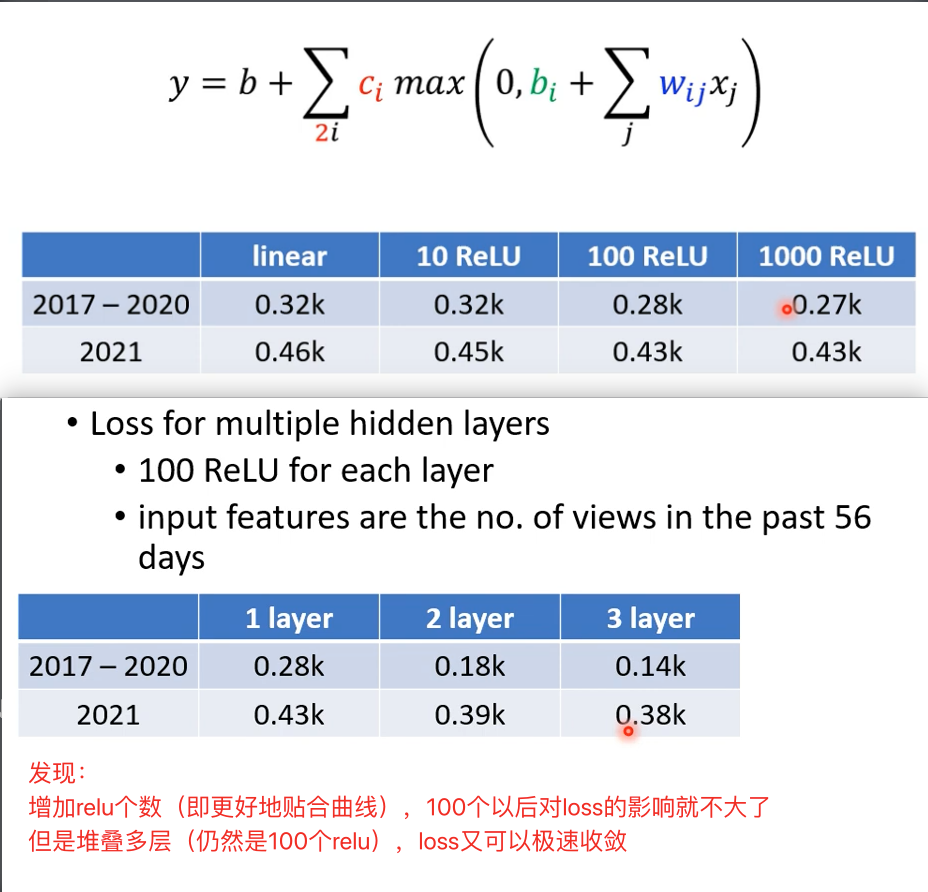
而如果再叠一层,在课程里的资料里,在训练集上loss仍然能下降(到0.1),但是在测试集里,loss反而上升了(0.44),这意味着开始过拟合了。
这就是反向介绍神经元和神经网络。先介绍数学上的动机,组成网络后再告诉你这是什么,而不是一上来就给你扯什么是神经元什么是神经网络,再来解释每一个神经元干了什么。
而传统的神经网络课程里,sigmoid是在逻辑回归里才引入的,是为了把输出限定在1和0之间。显然这里的目的不是这样的,是为了用足够多的sigmoid或relu来逼近真实的曲线(折线)
Framework of ML
通用步骤:
- 设定一个函数来描述问题$y = f_\theta(x)$, 其中$\theta$就是所有未知数(参数)
- 设定一个损失函数$L(\theta)$
- 求让损失函数尽可能小的$\theta^* = arg\ \underset{\theta}{\rm min}L(\theta)$
拟合不了的原因:
- 过大的loss通常“暗示”了模型不合适(model bias),比如上面的用前1天数据预测后一天,可以尝试改成前7天,前30天等。
- 大海里捞针,针其实不在海里
- 优化问题,梯度下降不到目标值
- 针在大海里,我却没有办法把它找出来
如何判断是loss optimization没做好?
用不同模型来比较(更简单的,更浅的)
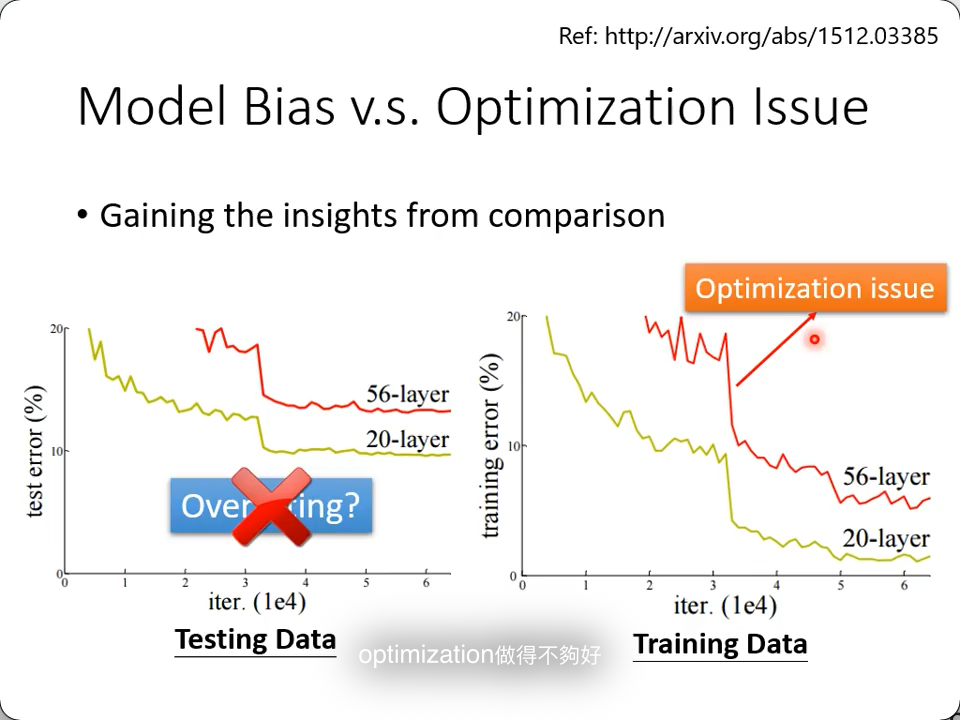
上图中,为什么56层的表现还不如20层呢?是overfitting吗?不一定。
我们看一下在训练集里的表现,56层居然也不如20层,这合理吗? 不合理
但凡20层能做到的,多出的36层可以直接全部identity(即复制前一层的输出),也不可能比20层更差(神经网络总可以学到的)
这时,就是你的loss optimization有问题了。
如何解决overfitting
- 增加数据量
- 增加数据量的绝对数量
- data augmentation数据增强(比如反复随机从训练集里取,或者对图像进行旋转缩放位移和裁剪等)
- 缩减模型弹性
- (低次啊,更少的参数「特征」啊)
- 更少的神经元,层数啊
- 考虑共用参数
- early stopping
- regularization
- 让损失函数与每个特征系数直接挂勾,就变成了惩罚项
- 因为它的值越大,会让损失函数越大,这样可以“惩罚”过大的权重
- dropout
- 随机丢弃一些计算结果
Missmatch
课上一个测试,预测2/26的观看人数(周五,历史数据都是观看量低),但因为公开了这个测试,引起很多人疯狂点击,结果造成了这一天的预测结果非常差。
这个不叫overfitting,而是mismatch,表示的是训练集和测试集的分布是不一样的
mismatch的问题,再怎么增加数据也是不可能解决的。
optimization problems
到目前为止,有两个问题没有得到解决:
- loss optimization有问题怎么解决
- 其实就是判断是不是saddle point(鞍点)
- mismatch怎么解决
saddle point
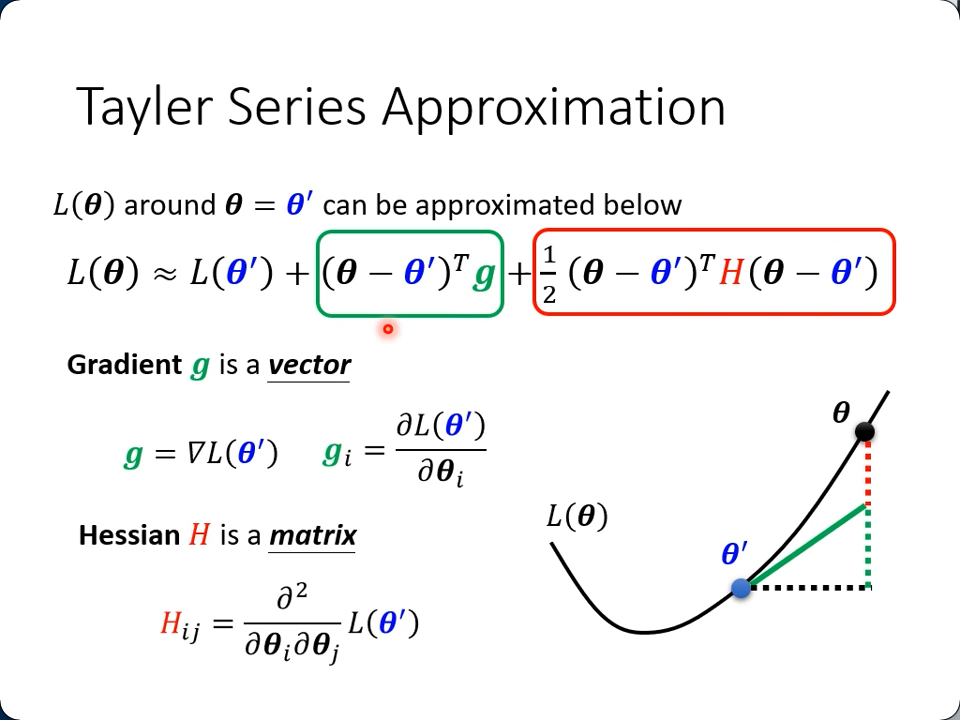
hessian矩阵是二次微分,当一次微分为0的时候,二次微分并不一定为0。这是题眼。
对于红杠内的部分,设$\theta - \theta^T = v$,有:
- for all v: $v^T H v > 0 \rightarrow \theta'$附近的$\theta$都要更大
- -> 确实是在
local minima
- -> 确实是在
- for all v: $v^T H v < 0 \rightarrow \theta'$附近的$\theta$都要更小
- -> 确实是在
local maxima
- -> 确实是在
- 而时大时小,说明是在
saddle point
事实上我们不可能去检查所有的v,这里用Hessian matrix来判断:
- $\rm H$ is
positive definite$\rightarrow$ all eigen values are positive $\rightarrow$ local minimal - $\rm H$ is
negative definite$\rightarrow$ all eigen values are negative $\rightarrow$ local maximal
用一个很垃圾的网络举例,输入是1,输出是1,有w1, w2两层网络参数,因为函数简单,两次微分得到的hessian矩阵还是比较简单直观的:
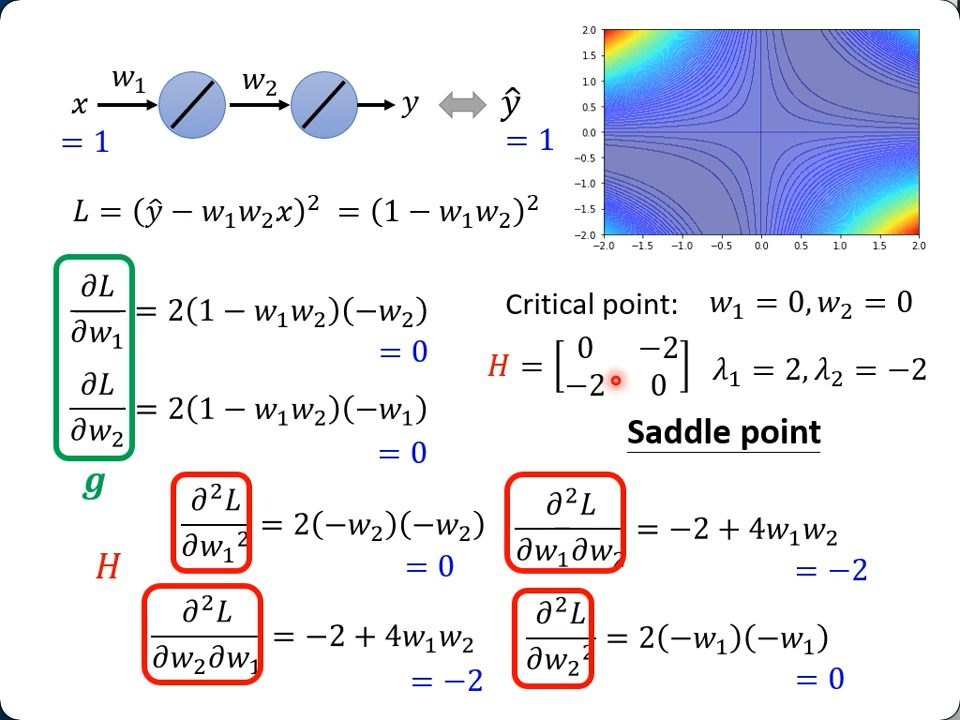
由于特征值有正有负,我们判断在些(0, 0)这个critical point,它是一个saddle point.
如果你判断出当前的参数确实卡在了鞍点,它同时也指明了update direction!
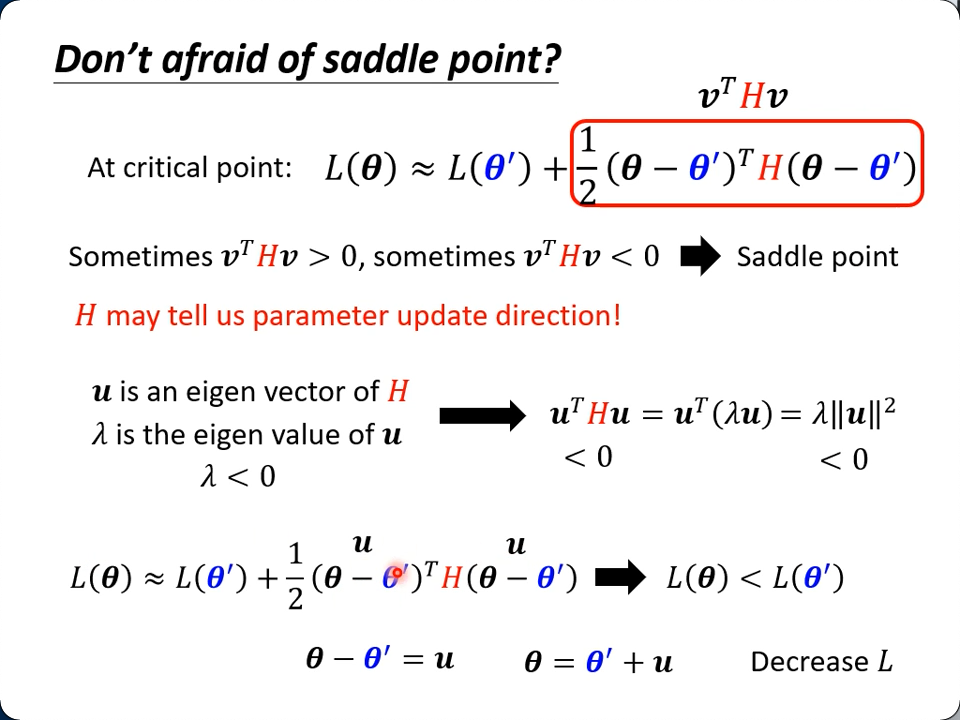
图中,
- 先构建出了一个小于0的结果,以便找到可以让$L(\theta)$收敛的目标
- 这个结果依赖于找到这样一个u
- 这个u是$\theta, \theta'$相减的结果
- 它还是$H$的
eigen vector - 它的
eigen value$\rightarrow \lambda$ 还要小于0
实际上,eigen value是可以直接求出来的(上例已经求出来了),由它可以推出eigen vector,比如[1, 1]$^T$(自行补相关课程),往往会一对多,应该都是合理的,我们顺着共中一个u去更新$\theta$,就可以继续收敛loss。
实际不会真的去计算hessian matrix?
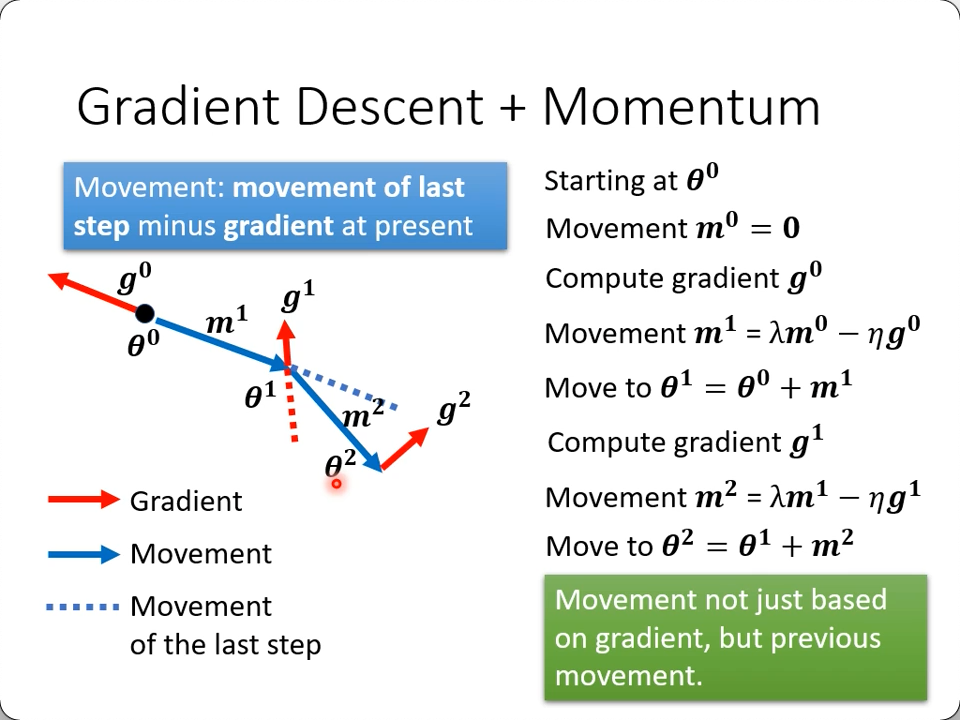
Momentum
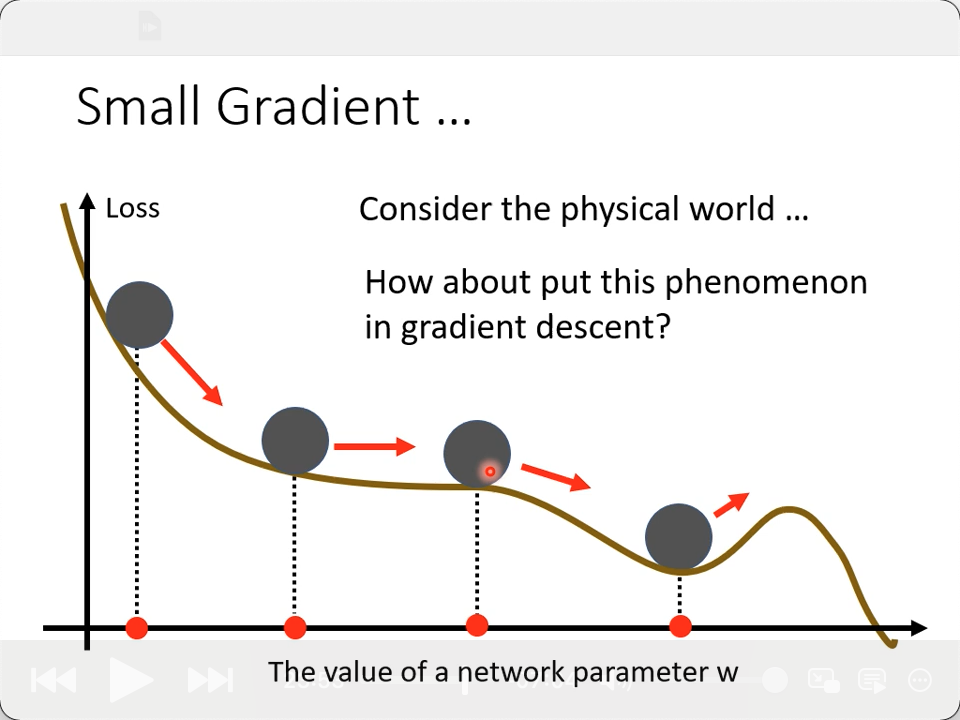
不管是较为平坦的面,还是saddle point,如果小球以图示的方式滚下去,真实的物理世界是不可能停留在那个gradient为0或接近于0的位置的,因为它有“动量”,即惯性,甚至还可能滚过local minima,这恰好是我们需要的特性。
adaptive learning rate
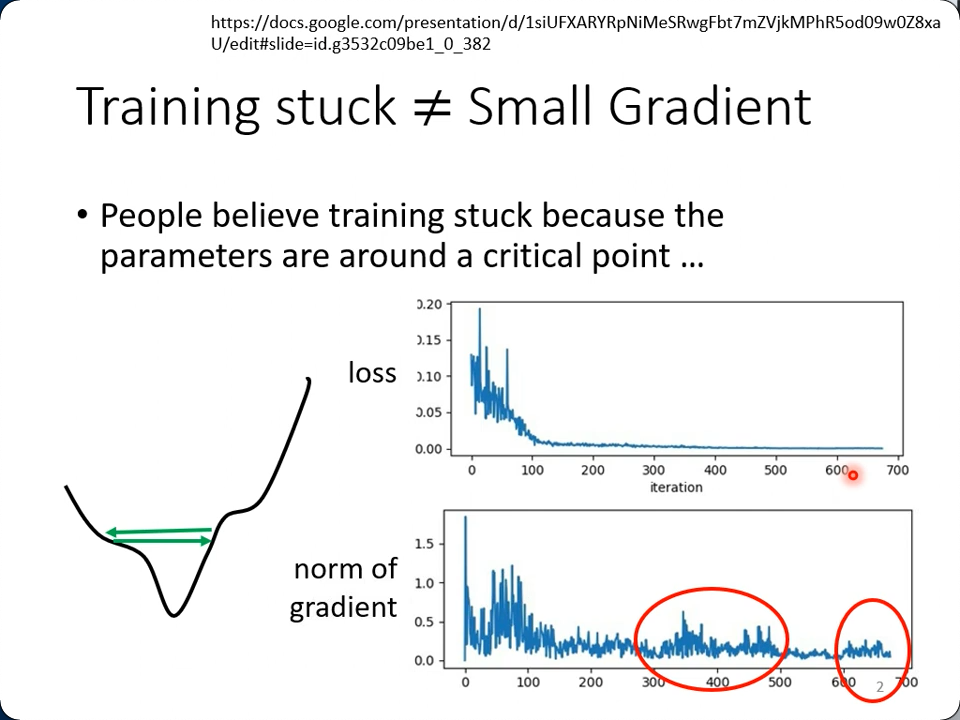
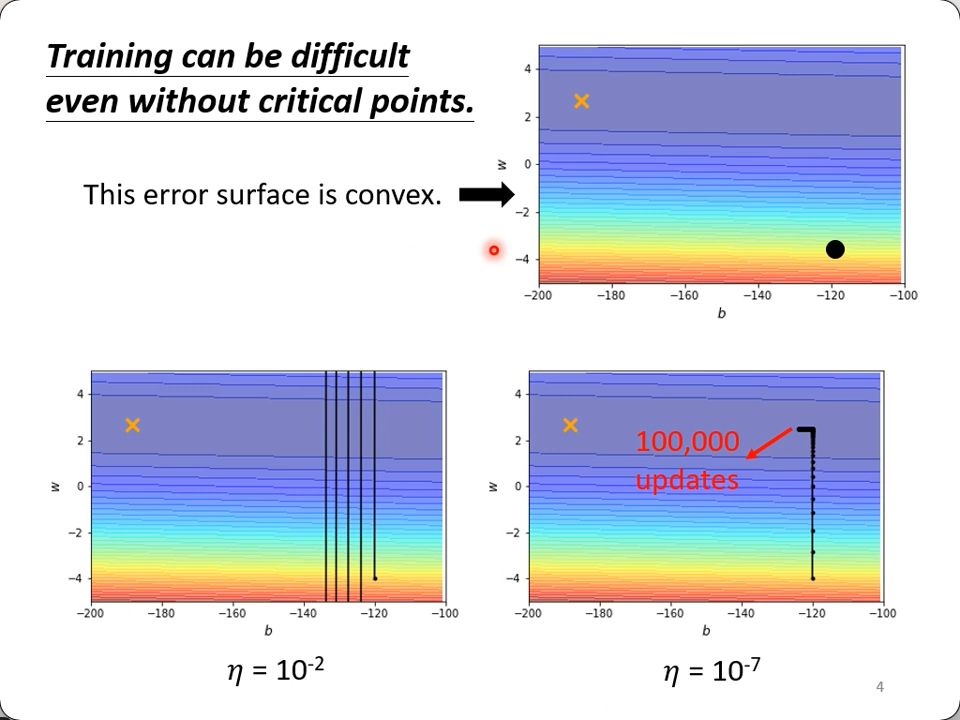
不是什么时候loss卡住了就说明到了极点(最小值,鞍点,平坦的点)
看下面这个error surface,两个参数,一个变动非常平缓,一个非常剧烈,如果应用相同的learning rate,要么反复横跳(过大),要么就再也挪不动步(太小):
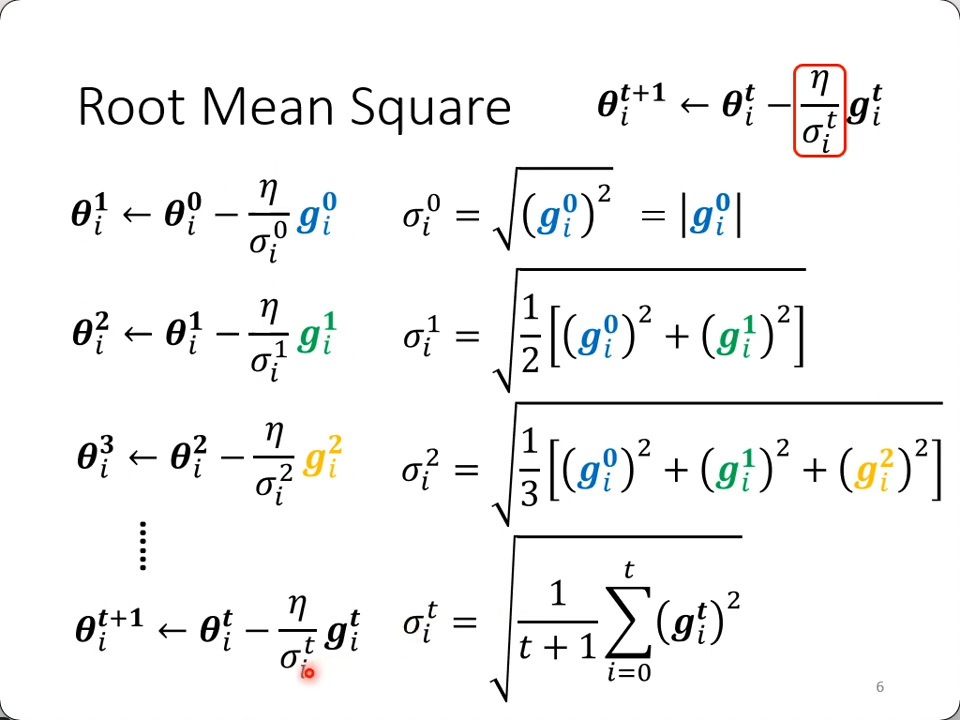
Adagrad (Root Mean Square)
于是有了下面的优化方法,思路与l2正则化差不多,利用不同参数本身gradient的大小来“惩罚”它起到的作用。
- 这里用的是相除,因为我的梯度越小,步伐就可以跨得更大了。
- 并且采用的是梯度的平方和(
Root Mean Square)
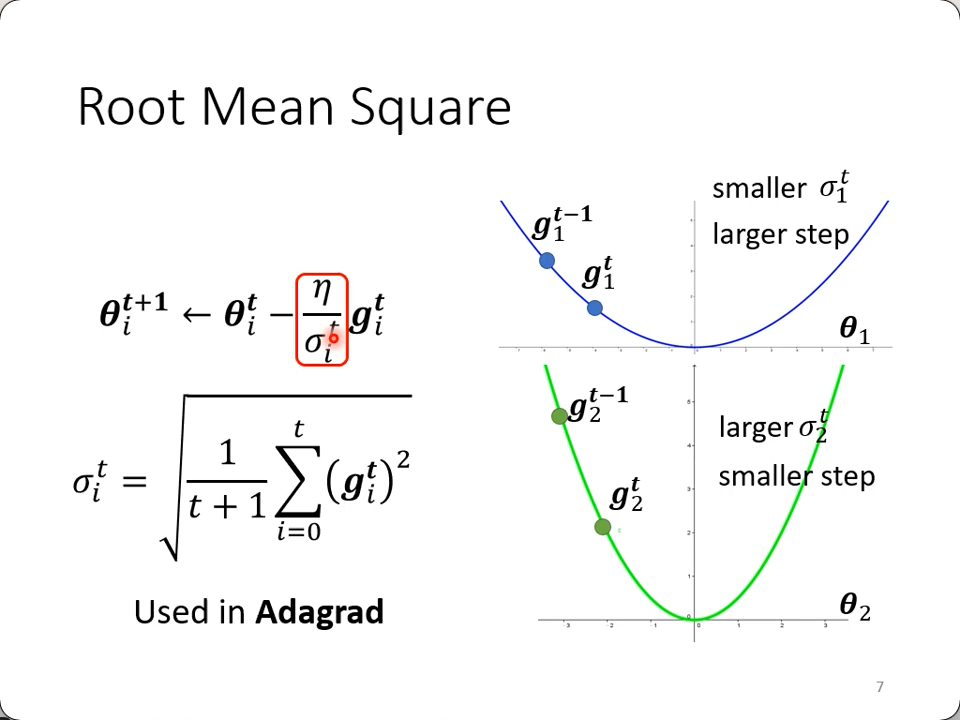
图中可以看出平缓的$\theta_1$就可以应用大的学习率,反之亦然。这个方法就是Adagrad的由来。不同的参数用不同的步伐来迭代,这是一种思路。
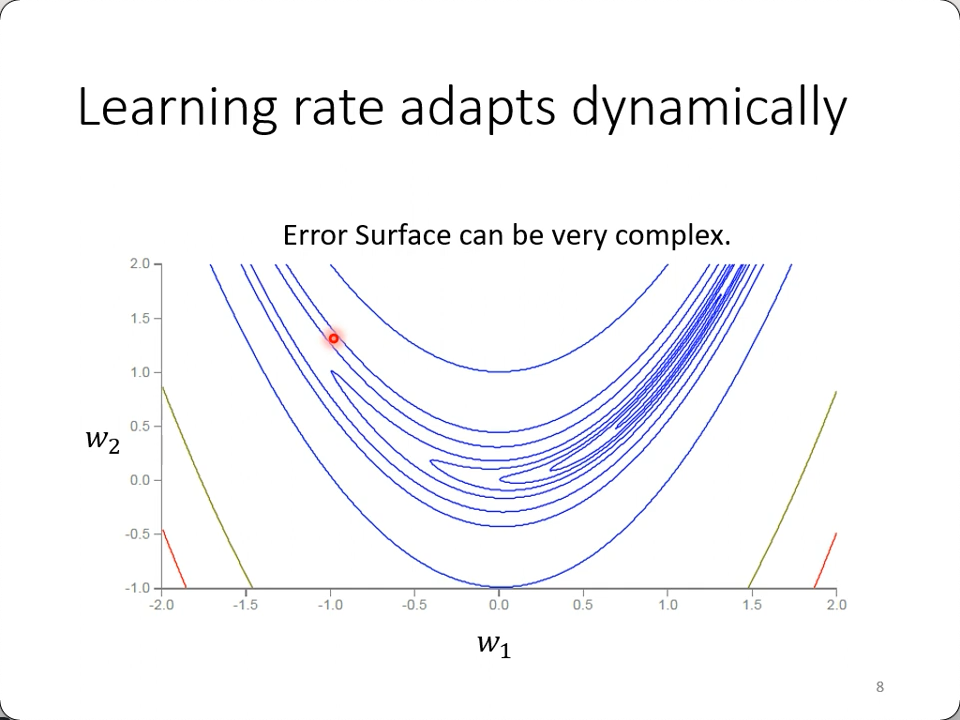
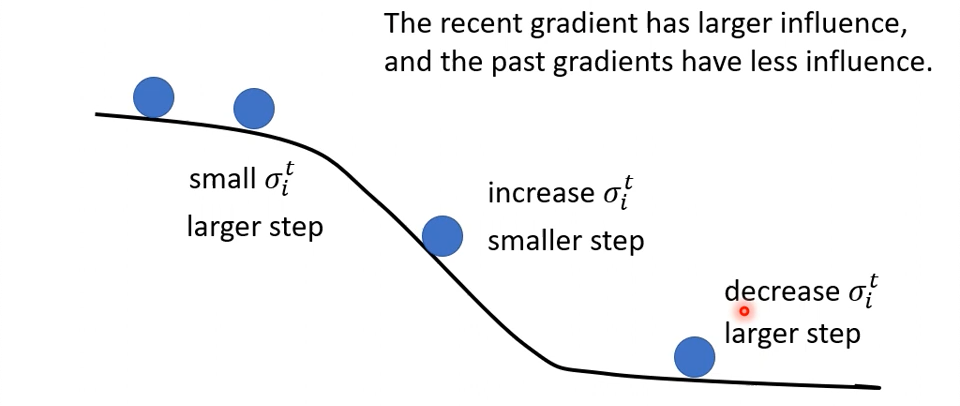
这就解决问题了吗?看下面这个新月形的error surface,不卖关子了,这个以前接触的更多,即梯度随时间的变化而不同,
RMSProp
这个方法是找不到论文的。核心思想是在Adagrad做平方和的时候,给了一个$\alpha$作为当前这个梯度的权重(0,1),而把前面产生的$\sigma$直接应用$(1-\alpha)$:
- $\theta_i^{t+1} \leftarrow \theta_i^t - \frac{\eta}{\color{red}{\sigma_i^t}} g_i^t$
- $\sigma_i^t = \sqrt{\alpha(\theta_i^{t-1})^2 + (1-\alpha)(g_i^t)^2}$
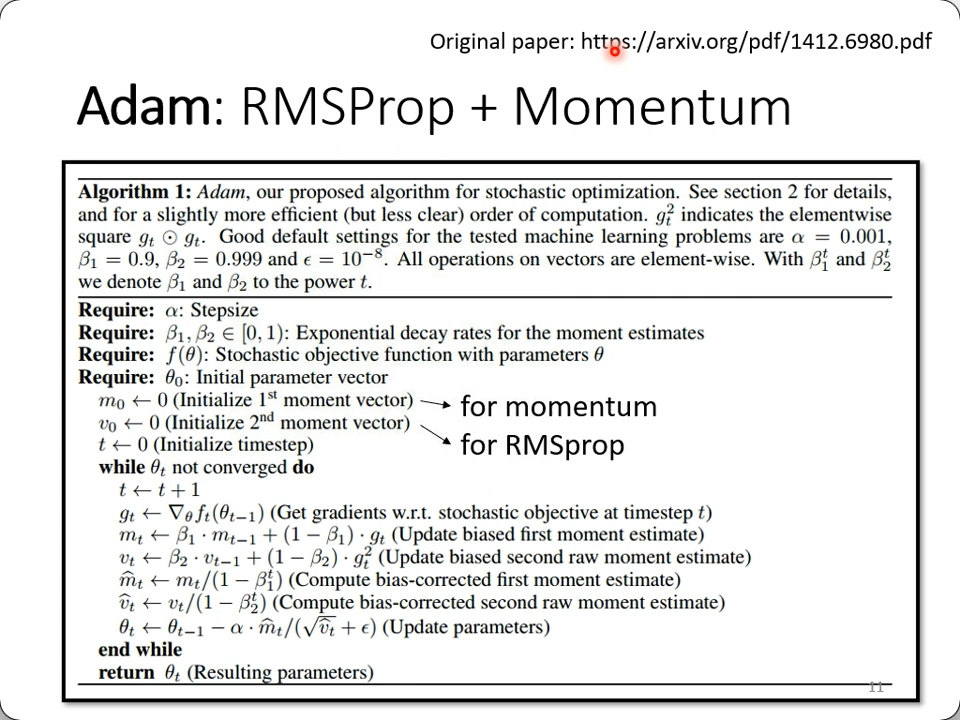
Adam: (RMSProp + Momentum)
Learning Rate Scheduling
终于来到了最直观的lr scheduling部分,也是最容易理解的,随着时间的变化(如果你拟合有效的话),越接近local minima,lr越小。
而RMSProp一节里说的lr随时间变化并不是这一节里的随时间变化,而是设定一个权重,始终让当前的梯度拥有最高权重,注重的是当前与过往,而schedule则考量的是有计划的减小。
下图中,应用了adam优化后,由于长久以来横向移动累积的小梯度会突然爆发,形成了图中的局面,应用了scheduling后,人为在越靠近极值学习率越低,很明显直接就解决了这个问题。
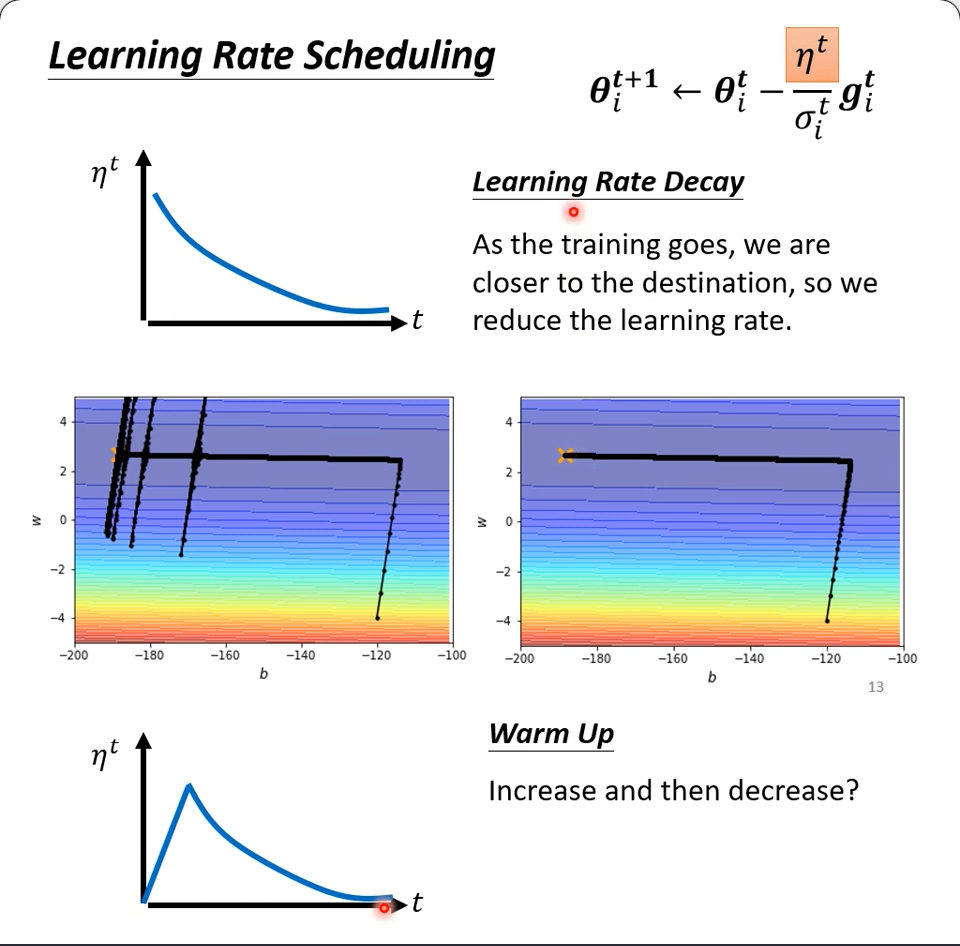
而warm up没有在原理或直观上讲解更多,了解一下吧,实操上是很可行的,很多知名的网络都用了它:
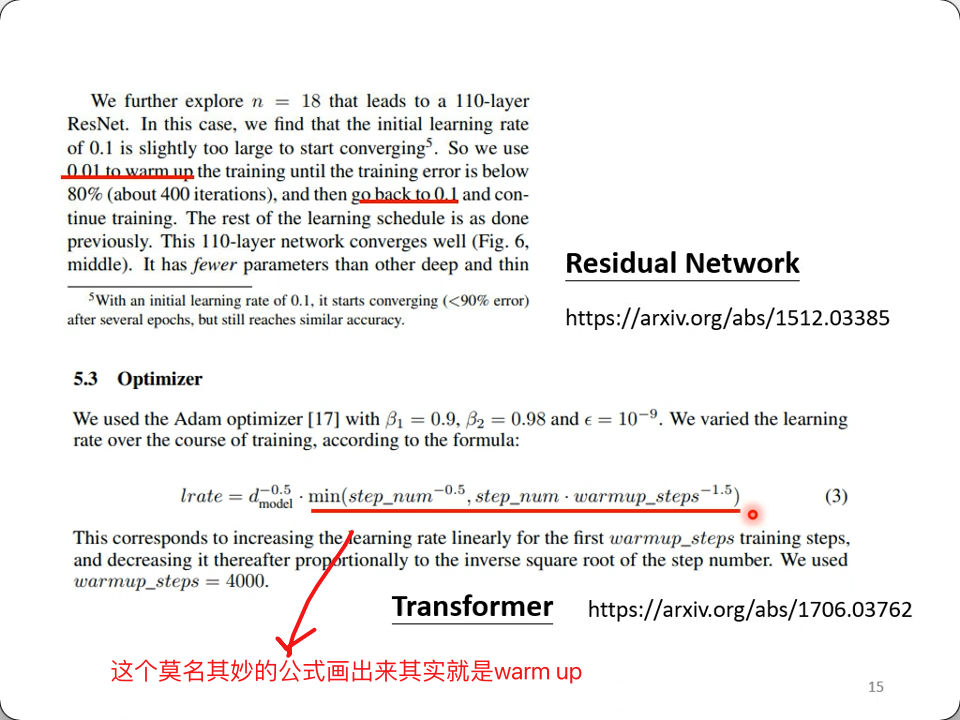
要强行解释的话,就是adam的$\theta$是一个基于统计的结果,所以要在看了足够多的数据之后才有意义,因此采用了一开始小步伐再增加到大步伐这样一个过度,拿到足够的数据之后,才开始一个正常的不断减小的schedule的过程。
更多可参考:RAdam: https://arxiv.org/abs/1908.03265
Summary of Optimization
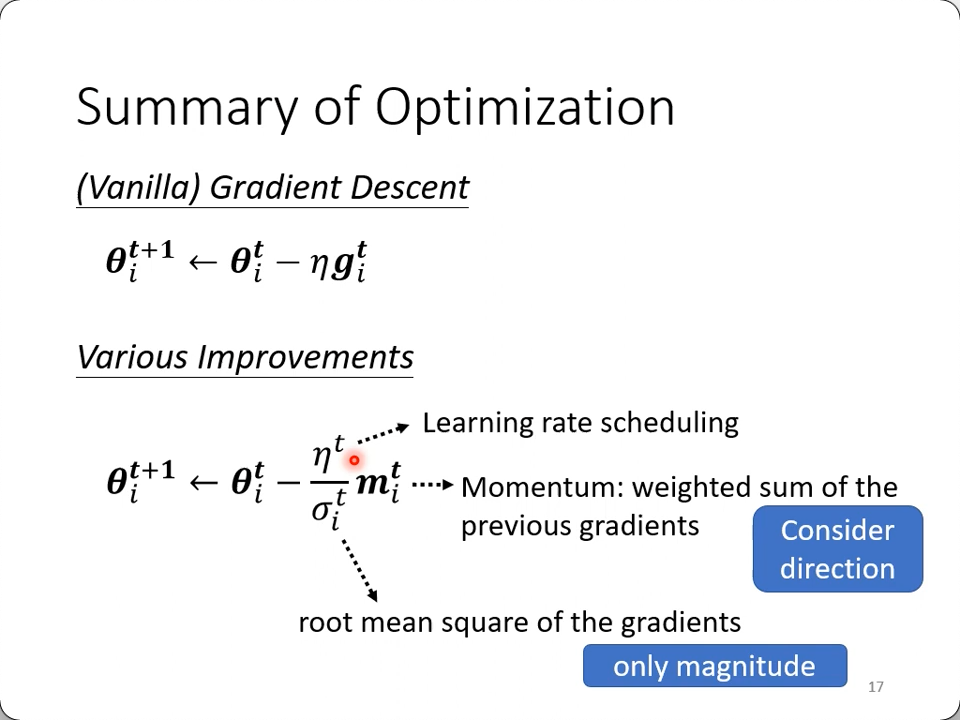
回顾下Momentum,它就是不但考虑当前的梯度,还考虑之前所有的梯度(加起来),通过数学计算,当然是能算出它的”动量“的。
那么同样是累计过往的梯度,一个在分母($\theta$),一个在分子(momentum),那不是抵消了吗?
- momentum是相加,保留了方向
- $\sigma$是平方和,只保留了大小
Batch Normalization
沿着cost surface找到最低点有一个思路,就是能不能把山“铲平”?即把地貌由崎岖变得平滑点? batch normalization就是其中一种把山铲平的方法。
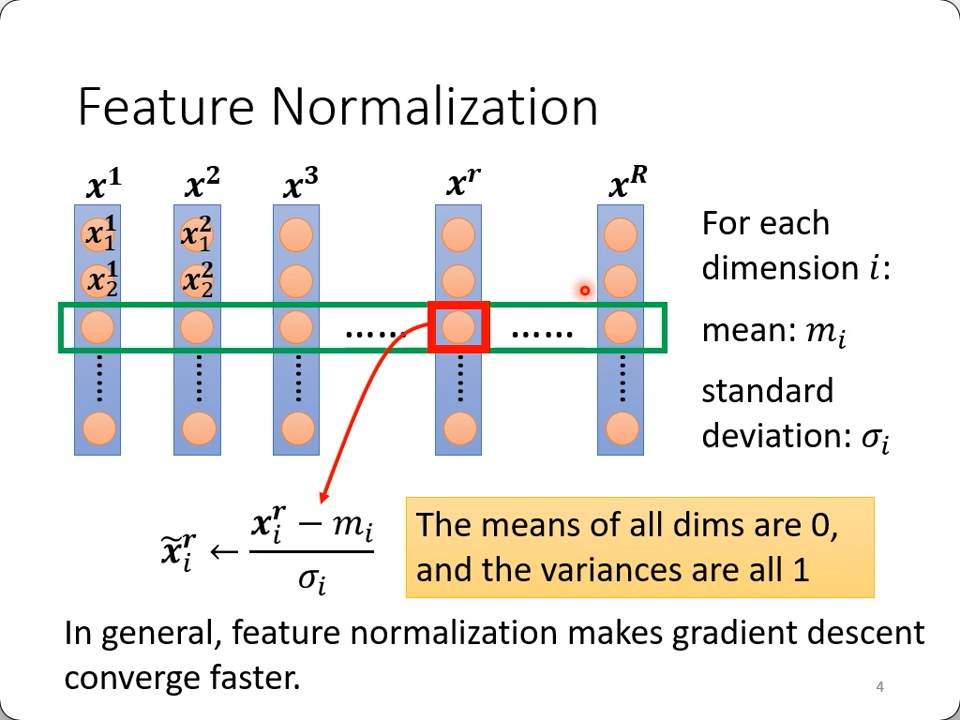
其实就是人为控制了error的范围,让它在各个feature上面的“数量级”基本一致(均值0,方差1),这样产生的error surface不会出现某参数影响相当小,某些影响又相当大,而纯粹是因为input本身量级不同的原因(比如房价动以百万计,而年份是一年一年增的)
error surface可以想象成每一个特征拥有一个轴(课程用二到三维演示),BN让每条轴上的ticks拥有差不多的度量。
然后,你把它丢到深层网络里去,你的输出的分布又是不可控的,要接下一个网络的话,你的输出又成了下一个网络的输入。虽然你在输出前nomalization过了,但是可能被极大和极小的权重w又给变了了数量级不同的输出
再然后,不像第一层,输入的数据来自于训练资料,下一层的输入是要在上一层的输出进行sigmoid之后的
再然后,你去看看sigmoid函数的形状,它在大于一定值或小于一定值之后,对x的变化是非常不敏感了,这样非常容易了出现梯度消失的现象。
于是,出于以下两个原因,我们都会考虑在输出后也接一次batch normalization::
- 归一化($\mu=0, \delta=1$)
- 把输入压缩到一个(sigmoid梯度较大的)小区间内
照这个思路,我们是需要在sigmoid之前进行一次BN的,而有的教材会告诉你之前之后做都没关系,那么之后去做就丧失了以上第二条的好处。
副作用
- 以前$x_1 \rightarrow z_1 \rightarrow a_1$
- 现在$\tilde z_1$是用所有$z_i$算出来的,不再是独立的了
后记1
最后,实际还会把$\tilde z_i$再这么处理一次:
- $\hat z_i = \gamma \odot \tilde z_i + \beta$
不要担心又把量级和偏移都做回去了,会以1和0为初始值慢慢learn的。
后记2
推理的时候,如果batch size不够,甚至只有一条时,怎么去算$\mu, \sigma$呢?
pytorch在训练的时候会计算moving averageof $\mu$ and $\sigma$ of the batches.(每次把当前批次的均值和历史均值来计算一个新的历史均值$\bar \mu$)
- $\bar \mu \leftarrow p \bar \mu + (1-p)\mu_t$
推理的时候用$\bar \mu, \bar \sigma$。
最后,用了BN,平滑了error surface,学习率就可以设大一点了,加速收敛。
Classification
用数字来表示class,就会存在认为1跟2比较近与3比较远的可能(从数学运算来看也确实是的,毕竟神经网络就是不断地乘加和与真值减做对比),所以引入了one-hot,它的特征就是class之间无关联。
恰恰是这个特性,使得用one-hot来表示词向量的时候成了一个要克服的缺点。预测单词确实是一个分类问题,然后词与词之间却并不是无关的,恰恰是有距离远近的概念的,而把它还原回数字也解决不了问题,因为单个数字与前后的数字确实近了,但是空间上还是可以和很多数字接近的,所以向量还是必要的,于是又继续打补丁,才有了稠密矩阵embedding的诞生。
softmax
softmax的一个简单的解释就是你的真值是0和1的组合(one-hot),但你的预测值可以是任何数,因为你需要把它normalize到(0,1)的区间。
当class只有两个时,用softmax和用sigmoid是一样的。
loss
可以继续用MeanSquare Error(MSE) $ e = \sum_i(\hat y_i - y'_i)^2$,但更常用的是:
Cross-entropy
$e = - \sum_i \hat y_i lny'_i$
Minimizing cross-entropyis equivalent tomaximizing likelihood
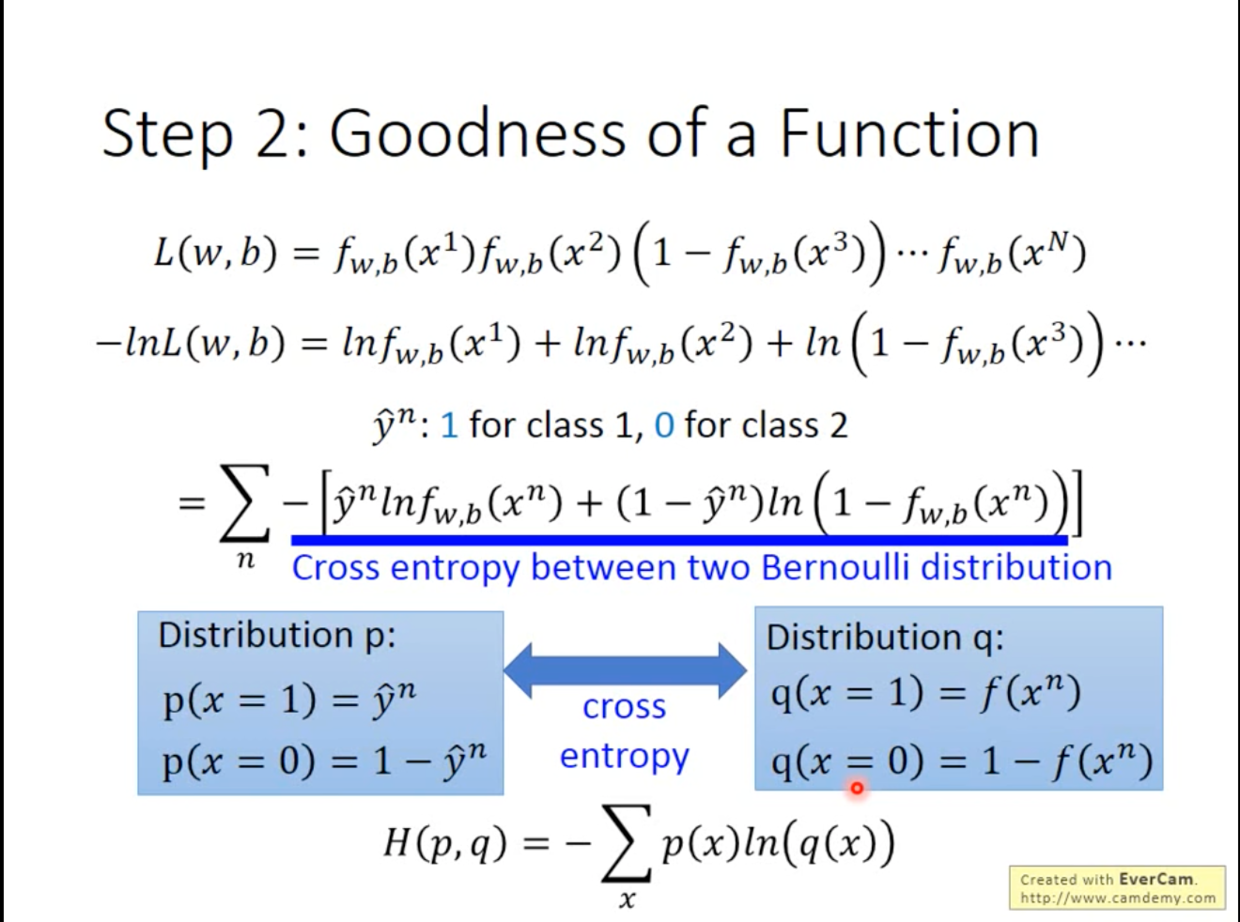
linear regression是想从真值与预测值的差来入手找到最合适的参数,而logistic regression是想找到一个符合真值分布的的预测分布。
在吴恩达的课程里,这个损失函数是”找出来的“:
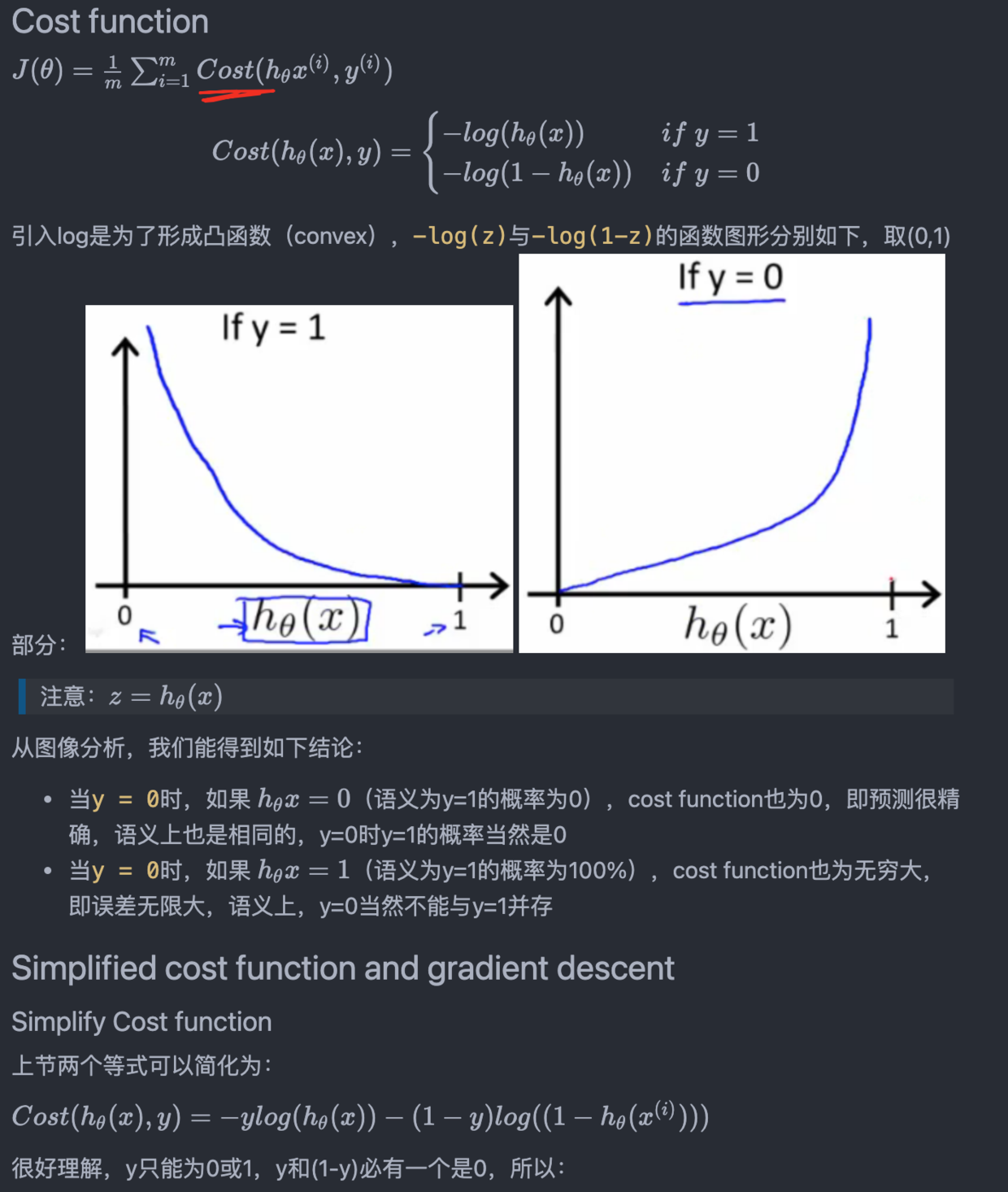
- 首先,$\theta x$后的值可以是任意值,所以再sigmoid一下,以下记为hx
- hx的意思就是
y为1的概率 - 我需要一个损失函数,希望当真值是0时,预测y为1的概率的误差应该为无穷大
- 也就是说hx=0时,损失函数的结果应该是无穷大
- 而hx=1时, 损失应该为0
- 同理,当y为1时,hx=0时损失应该是无穷大,hx=1时损失为0
- 这时候才告诉你,log函数刚好长这样,请回看上面的两张图
而别的地方是告诉你log是为了把概率连乘变成连加,方便计算。李宏毅这里干脆就直接告诉你公式长这样了。。。
这里绕两个弯就好了:
- y=1时,预测y为1的概率为1, y=0时,应预测y=1的概率为0
- 而这里是做损失函数,所以预测对了损失为0,错了损失无穷大
- 预测为1的概率就是hx,横轴也是hx
课程里说softmax和cross entorpy紧密到pytorch里直接就把两者结合到一起了,应用cross entropy的时候把softmax加到了你的network的最后一层(也就是说你没必要手写)。这里说的只是pytorch是这么处理的吗?
----是的
CE v.s. MSE
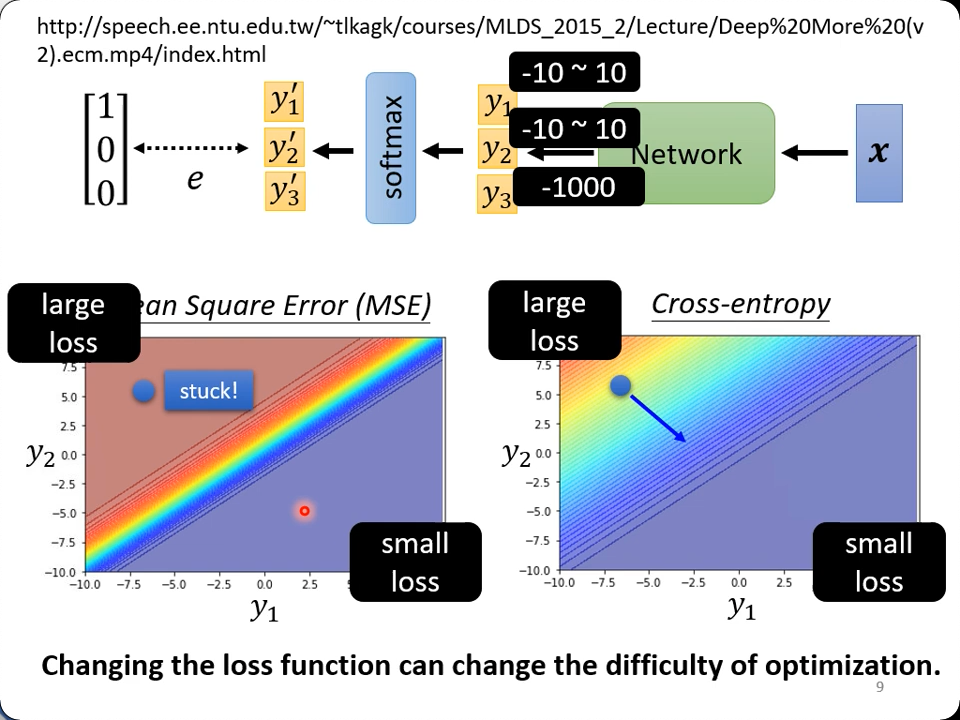
单看实验结果,初始位置同为loss较大的左上角,因为CE有明显的梯度,很容易找到右下角的极值,但是MSE即使loss巨大,但是却没有梯度。因此对于逻辑回归,选择交叉熵从实验来看是合理的,数学推导请看上面的链接。