李宏毅Machine Learning 2021 Spring笔记[4]
Adversarial Attack
给你一张猫的图片,里面加入少许噪音,以保证肉眼看不出来有噪音的存在:
- 期望分类器认为它不是猫
- 期望分类器认为它是一条鱼,一个键盘...
比如你想要欺骗垃圾邮件过滤器
- 找到一个与$x^0$非常近的向量x
- 网络正常输出y
- 真值为$\hat y$
- $L(x) = -e(y, \hat y)$
- $x^* = arg\underset{d(x^0, x) \leq \epsilon}{\rm min}\ L(x)$ 即要找到令损失最大的x
- 这里L(x)我们取了反
- $\epsilon$越小越好,指的是$x^0$要与x越接近越好(欺骗人眼)
- 如果还期望它认成是$y^{target}$,那就再加上与其的的损失
- $L(x) = -e(y, \hat y) + e(y, y^{target})$
- 注意两个error是反的,一个要求越远越好(真值),一个要求越近越好(target)
怎么计算$d(x^0, x) \leq \epsilon$呢?
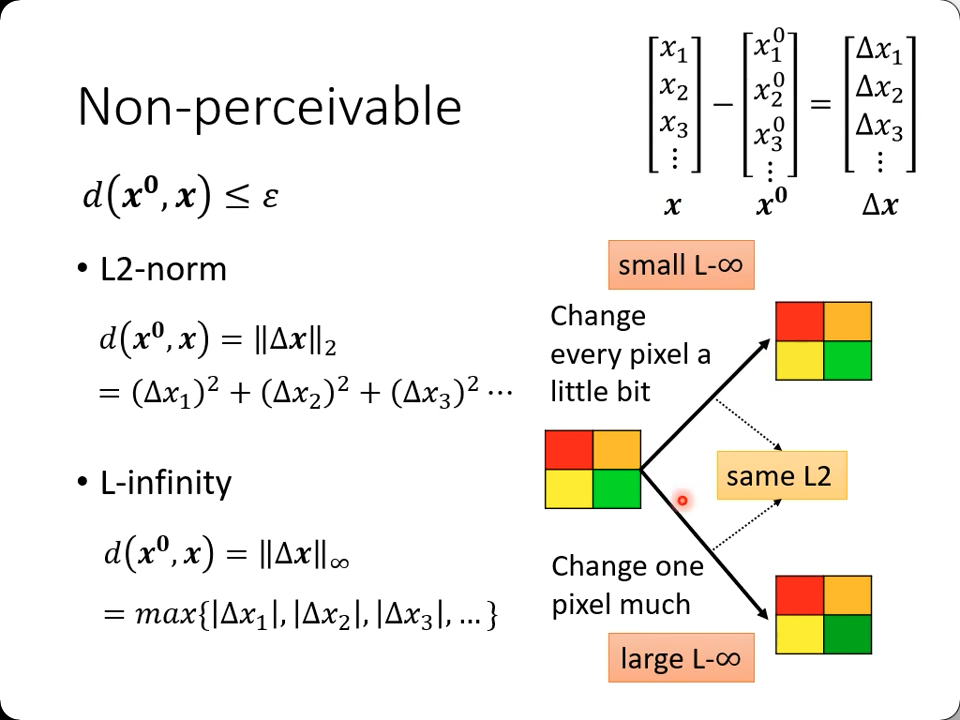
图上可知,如果都改变一点点,和某一个区域改动相当大,可能在L2-norm的方式计算出来是一样的,但是在L-infinity看来是不一样的(它只关心最大的变动)。
显然L-infinity更适合人眼的逻辑,全部一起微调人眼不能察觉,单单某一块大调,人眼是肯定可以看出来的。
而如果是语音的话,可能耳朵对突然某个声音的变化反而不敏感,整体语音风格变了却能立刻认出说话的人声音变了,这就要改变方案了。
Attack Approach
如何得到这个x呢?其实就是上面的损失函数。以前我们是为了train权重,现在train的就是x本身了。
- 损失达到我们的要求 (有可能这时候与原x相关很远)
- 与原x的距离达到我们的要求, 怎么做?
- 其实就是以$x^0$为中心,边长为$2\epsilon$的矩形才是期望区域
- 如果update后,$x^t$仍然落在矩形外,那么就在矩形里找一个离它最近的点,当作本轮更新后的$x^t$,进入下一轮迭代
Fast Gradient Sign Method(FGSM): https://arxiv.org/abs/1412.6572
- 相比上面的迭代方法,FGSM只做一次更新
- 就是根据梯度,判断是正还是负,然后把原x进行一次加减$\epsilon$的操作(其实等于是落在了矩形的四个点上)
- 也就是说它直接取了四个点之一作为$x^0$
White Box v.s. Black Box
讲上述方法的时候肯定都在疑惑,分类器是别人的,我怎么可能拿到别人的模型来训练我的攻击器? -> White Box Attack
那么Black Box Attack是怎么实现的呢?
- 如果我们知道对方的模型是用什么数据训练的话,我们也可以训练一个类似的(proxy network)
- 很大概率都是用公开数据集训练的
- 如果不知道的话呢?就只能尝试地丢一些数据进去,观察(记录)它的输出,然后再用这些测试的输入输出来训练自己的proxy network了。
- one pixel attack
- universal adversarial attack
- 万能noise
- https://arxiv.org/abs/1610.08401
- 声音
- 文本
- 物理世界
- 比如欺骗人脸识别系统,去认成另一个人
- 又比如道路环境,车牌识别等,也可以被攻击
- 要考虑摄像头能识别的分辨率
- 要考虑训练时候用的图片颜色与真实世界颜色不一致的问题
- Adversarial Reprogramming
- Backdoor in Model
- attack happens at the training phase
- https://arxiv.org/abs/1804.00792
- be careful of unknown dataset...
Defence
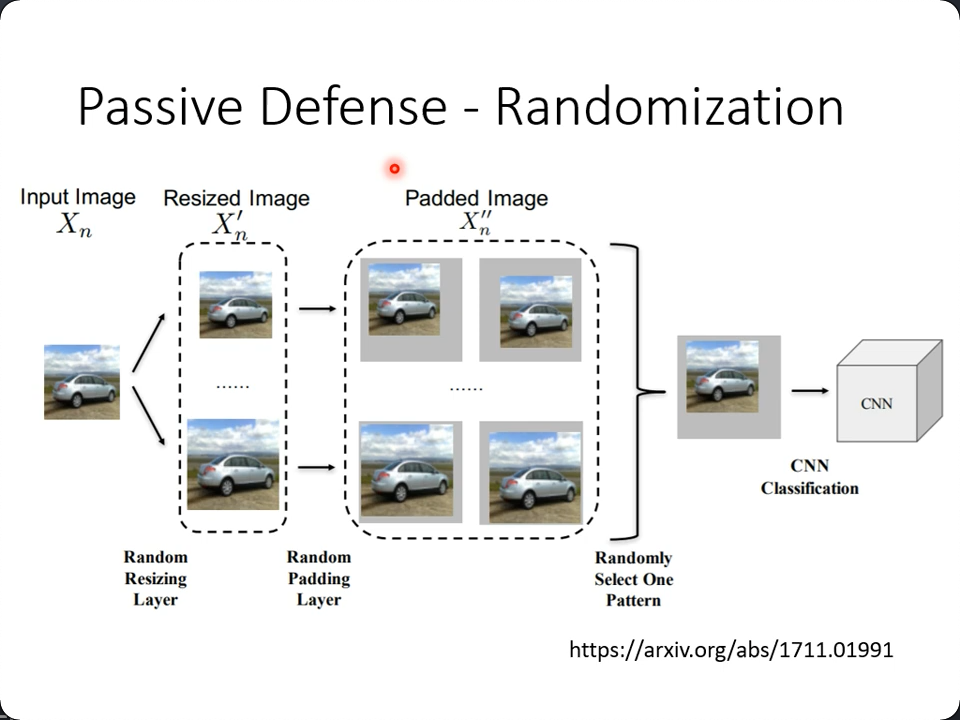
Passive Defense(被动防御)
进入network前加一层filter
- 稍微模糊化一点,就去除掉精心设计的noise了
- 但是同时也影响了正常的图像
- 对原图进行压缩
- 把输入用Generator重新生成一遍
如果攻击都知道你怎么做了,其实很好破解,就把你的filter当作network的一部分重新开始设计noise,所以可以选择加入随机选择的一些预处理(让攻击者不可能针对性地训练):
Proactive Defense(主动防御)
训练的时候就训练比较不容易被攻破的模型。比如训练过程中加入noise,把生成的结果重新标注回真值。
- training model
- find the problem
- fix it
有点类似于Data Augmentation
仍然阻挡不了新的攻击算法,即你对数据进行augment之外的范围。
Explainable Machine Learning(可解释性)
- correct answers $\neq$ intelligent
- 很多行业会要求结果必须可解释
- 银行,医药,法律,驾驶....
Local Explanation
Why do you thing this image is a cat?
Global Explanation
What does a "cat" look like?
- 遮挡或改变输入的某些部分,观察对已知输出的影响
- (比如拦到某些部分确实认不出图像是一条狗了)
- 遮挡或改变输入的某些部分,把两种输出做loss,对比输入变化与loss变化:
- $|\frac{\varDelta e}{\varDelta x}| \rightarrow \frac{\partial e}{\partial x_n}$
把上述(任一种)每个部分(像素,单词)的影响结果输出,就是:Saliency Map
Saliency Map

图1,2就是为了分辨宝可梦和数码宝贝,人类一般很难区分出来,但机器居然轻松达到了98%的准确率,经过绘制Saliency Map,发现居然就是图片素材(格式)的原因,一个是png,一个是jpg,造成背景一个是透明一个是不透明的。
也就是说,能发现机器判断的依据不是我们关注的本体(高亮部分就是影响最大的部分,期望是在动物身上)
第三张图更可笑,机器是如何判断这是一只马的?居然也不是马的本体,而是左下角,标识图片出处的文字,可能是训练过程中同样的logo过多,造成了这个“人为特征”。
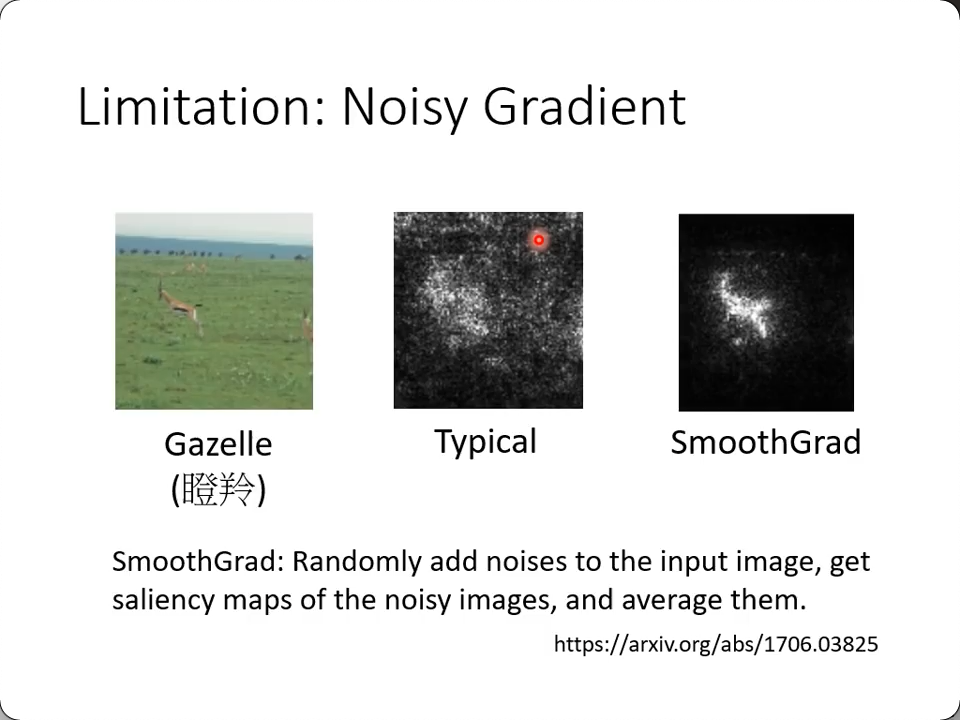
解决方案:
Smooth Gradient
随机给输入图片加入噪点,得到saliency map(们),然后取平均
Integrated gradient(IG)
一个特征在从无到有的阶段,梯度还是明显的,但是到了一定程度,特征再增强,对gradient影响也不大了,比如从片子来判断大象,到了一定长度,一张图也不会“更像大象”
一种思路:https://arxiv.org/abs/1611.02639
global explaination
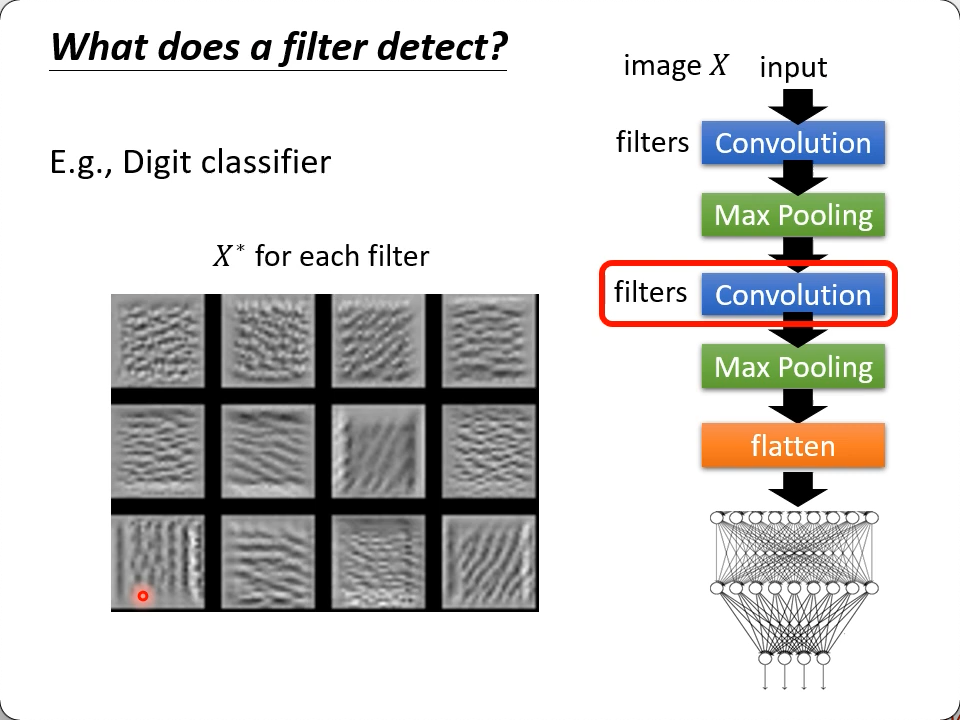
What does a filter detect?
如果经过某层(训练好的)filter,得到的feature map一些位置的值特别大,那说明这个filter提取的就是这类特征/patten。
我们去"创造"一张包含了这种patten的图片:$X^* = arg\ \underset{X}{\rm max}\sum_i\sum_j a_{ij}$,即这个图片是“训练/learn“出来的,通过找让X的每个元素($a_{ij}$)在被filter乘加后结果最大的方式。 -> gradient ascent
然后再去观察$X^*$有什么特征,就基本上可以认定这个(训练好的)filter提取的是什么样的patten了。
adversarial attack类似的原理,但这是对单filter而言。如果你想用同样的思路去让输出y越大越好,得到X,看X是什么,得到的X大概率都是一堆噪音。如果能生成图像,那是GAN的范畴了。
于是,尝试再加一个限制,即不但要让y最大,还要让X看起来最有可能像一个数字:
- $R(X)$: how likely X is a digit
- $X^* = arg\ \underset{X}{\rm max}y_i + \color{red}{R(X)}$
- $R(X) = -\sum_{i,j}|X_{i,j}|$ 比如这个规则,期望每个像素越黑越好
Domain Adaptation
Transfer Learning的一种,在训练数据集和实际使用的数据集不一样的时候。 https://youtu.be/qD6iD4TFsdQ
需要你对target domain的数据集有一定的了解。
有一种比较好的情况就是,target domain既有数据,还有标注(但不是太多,如果太多的话就不需要source domain了,直接用target来训练就好了),那就像bert一样,去fine tune结果,要注意的是标本量过小,可能很容易overfitting.
如果target doamin有大量资料,但是没有标注呢?
Domain Adversarial Training
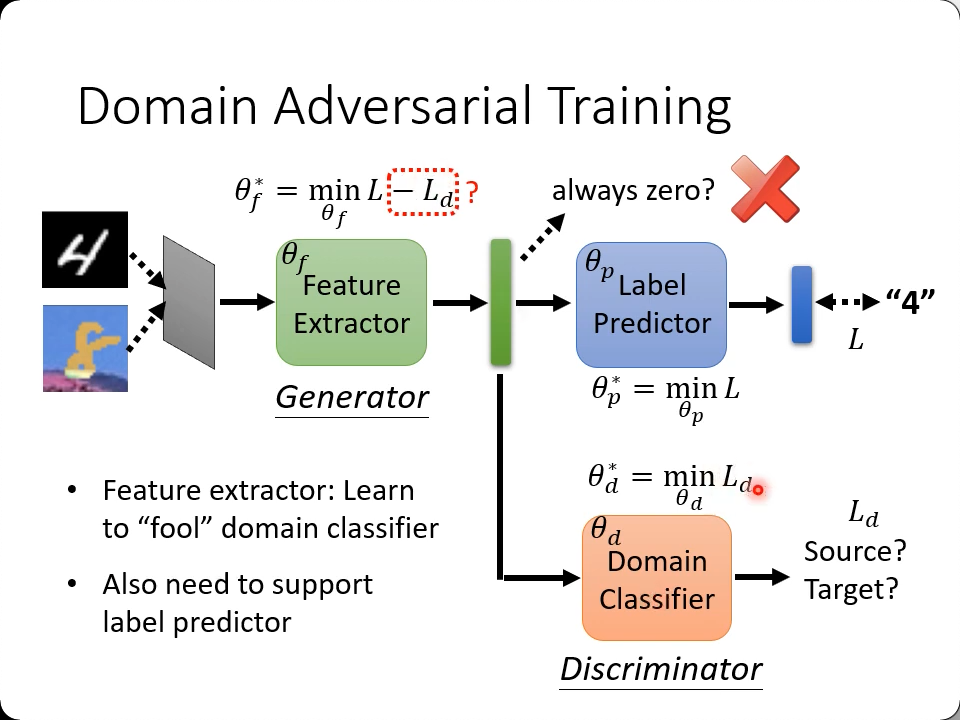
- 把source domain的network分为特征提取器(取多少层cnn可以视为超参,并不一定要取所有层cnn)和分类器
- 然后在特征取层之后跟另一个分类器,用来判断图像来自于source还是target(有点像
Discriminator - 与真值有一个loss,source, target之间也有一个loss,要求找到这样的参数组分别让两个loss最小
- loos和也应该最小(图中用的是减,但其实$L_d$的期望是趋近于0,不管是正还是负都是期望越小越好)(不如加个绝对值?)
- 每一小块都有一组参数,是一起训练的
- 目的就是既要逼近训练集的真值,还要训练出一个网络能模糊掉source和target数据集的差别
Limit
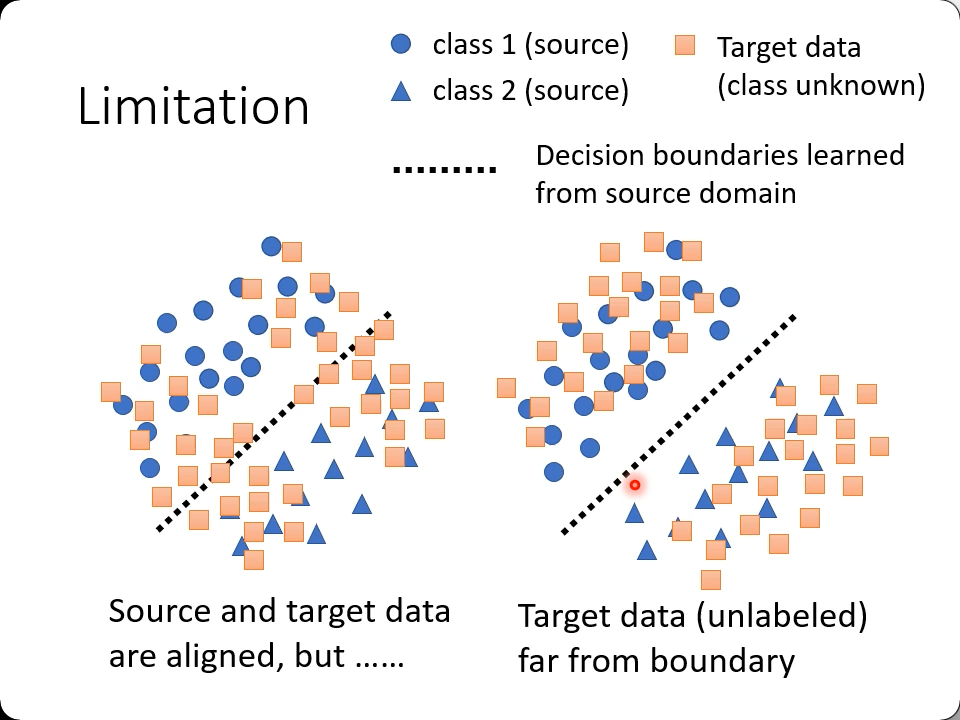
如果target数据集如上图左,显然结果是会比上图右要差一点的,也就是说尽量要保持同分布。在这里用了另一个角度,就是让数据离boundary越远越好
- Decision-boundary Iterative Refinement Training with a Teacher(
DIRT-T) - Maximum Classifier Discrepancy https://arxiv.org/abs/1712.02560
More
- 如果source 和 target 里的类别不完全一样呢?
- Universal domain adaptation
- 如果target既没有label,数据量也非常少(比如就一张)呢?
- Test Time Training(TTT) https://arxiv.org/abs/1909.13231
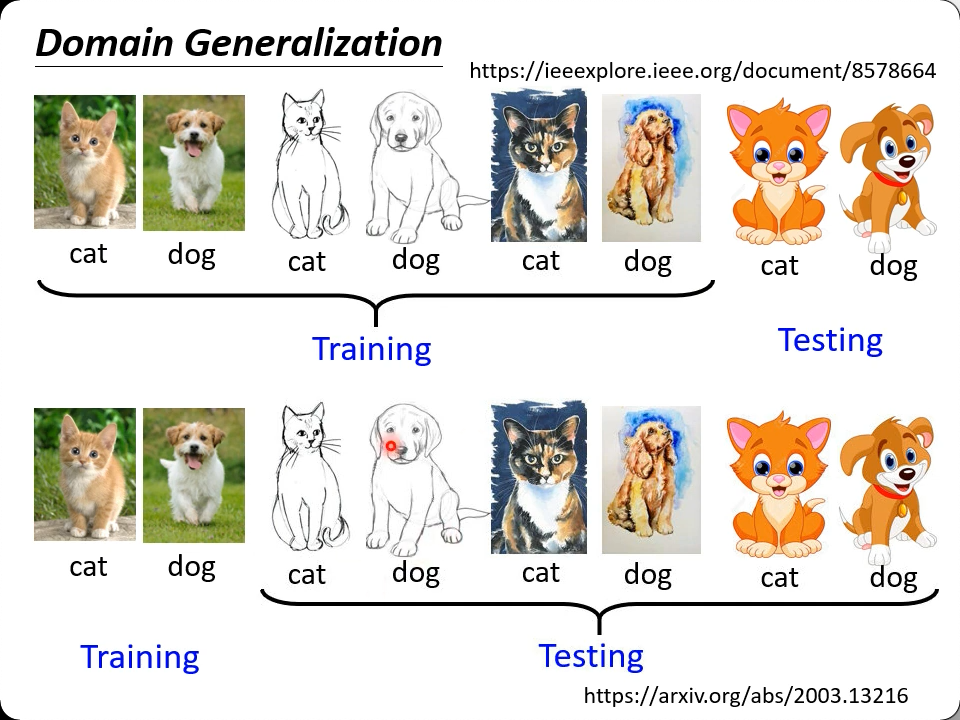
Domain Generalization
Deep Reinforcement Learning (RL)
- Environment 给你
Observation - Actor 接收入
Observation, 输出Action Action反馈给 Environment, 计算出Reward反馈给 Actor- 要求
Reward最大
与 GAN 的不同之处,不管是生成器还是判别器,都是一个network,而RL里面,Actor和Reward都是黑盒子,你只能看到结果。
Policy Gradient
- 先是用很类似监督学习的思路,给每一步的最优(或最差)方案一个label,有label就能做loss。先把它变成一个二分类的问题。
- 打分还可以不仅仅是“好”或“不好”,还可以是一个程度,比如1.5比0.5的“支持”力度要大一些,而-10显然意味着你千万不要这么做,非常拒绝。
- 比如某一步,可以有三种走法,可以用onehot来表示,其中一种走法可以是[1,0,0]$^T$,表示期望的走法是第一种。
- 但是也可以是[-1,0,0]$^T$,标识这种走法是不建议的
- 也可以是[3.5,0,0]$^T$等
- 后面会用
1, -1, 10, 3.5这样的scalar来表示,但要记住其实它们是ont-hot中的那个非零数。
现实世界中很多场景不可能执行完一步后就获得reward,或者是全局最佳的reward(比如下围棋)。
v1
一种思路是,每一步之后,把游戏/棋局进行完,把当前reward和后续所有步骤的reward加一起做reward -> cumulated reward $\rightarrow G_t = \sum_{n=t}^Nr_n$
v2
这种思路仍然有问题,游戏步骤越长,当前步对最终步的影响越小。因此引入一个小于1的权重$\gamma < 1$: $G_1' = r_1 + \gamma r_2 + \gamma^2r_3 + \cdots$
这样越远的权重越小: $G_t' = \sum_{n=t}^N \color{red}{\gamma^{n-t}} r_n$
注意,目前得到的
G就是为了给每一次对observation进行的action做loss的对象。
v3
标准化reward。你有10分,是高是低?如果所有人都是20分,那就是低分,所以与G做对比的时候,通常要减去一个合适的值b,让得分的分布有正有负。
Policy Gradient
普通的gradient descent是搜集一遍数据,就可以跑for循环了,而PG不行,你每次得到梯度后,要重采一遍样,其实也很好理解,你下了某一步,经过后续50步后,输了,你的下一轮测试应该是下一盘随机的棋,而不是把更新好的参数再用到同一盘棋去。
还是不怎么好理解,至少要知道,我做参数是不为了训练出这一盘棋是怎么下出来的,而是根据这个(大多是输了的)结果,以及学到的梯度,去下一盘新的棋试试。
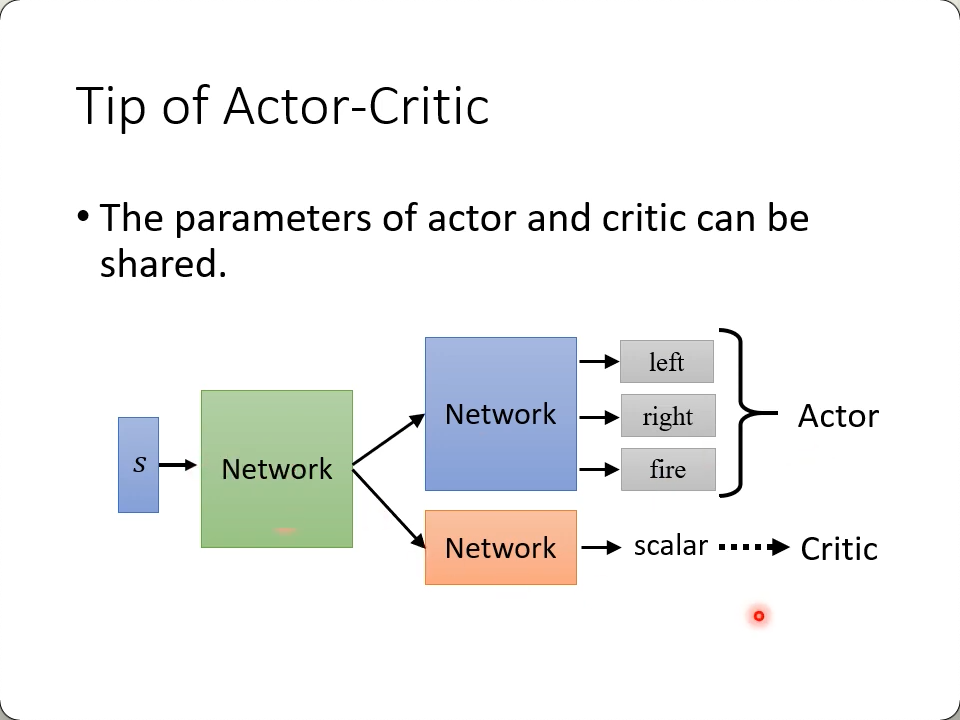
Actor Critic
Critic:
- Given
actor$\theta$, how good it is whenobservings (and taking action a)
Value function $V^\theta(s)$:
- 使用actor $\theta$的时候,预测会得到多少的
cumulated reward - 分高分低其实还是取决于actor,同样的局面,不同的actor肯定拿的分不同。
Monte-Carlo based approach (MC)
蒙特卡洛搜索,正常把游戏玩完,得到相应的G.
Temporal-difference approach (TD)
不用玩完整个游戏,就用前后时间段的数据来得到输出。
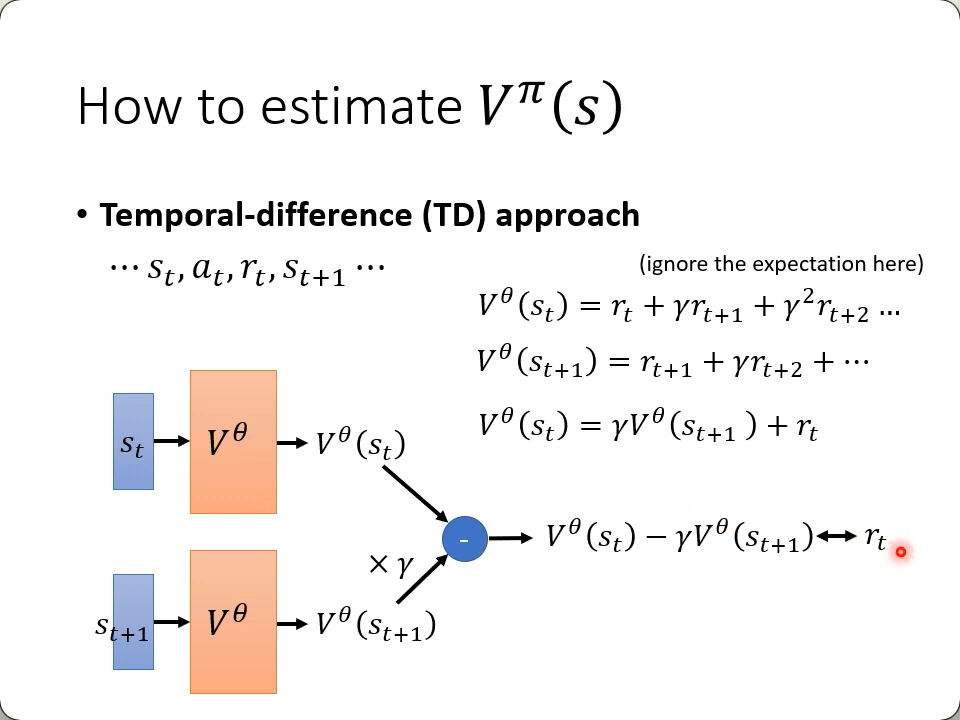
关键词:
- 我们既不知道v(t+1),也不知道v(t),但确实能知道
v(t+1)-v(t).
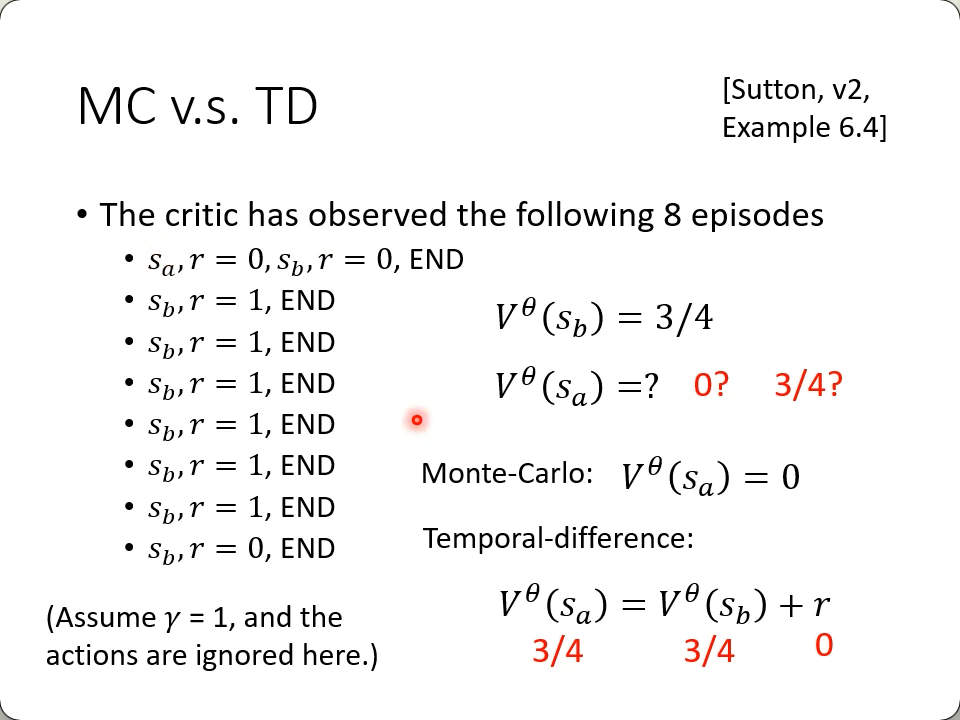
这个例子没看懂,后面七次游戏为什么没有sa了?
v3.5
上文提到的V可以用来作更早提到的b:
- ${S_t, a_t}\ A_t = G_t' - V^\theta(S_t)$
- 回顾一下,$V^\theta(S_t)$是看到某个游戏画面时算出来的reward
- 它包含$S_t$状态下,后续各种步骤的reward的平均值
- 而$G_t'$则是这一步下的rewared
- 两个数相减其实就是看你的这一步是比平均水平好还是差
- 比如你得到了个负值,代表在当前场景下,这个actor执行的步骤是低于平均胜率的,需要换一种走法。
v4
3.5版下,G只有一个样本(一次游戏)的结果,这个版本里,把st再走一步,试难$S_{t+1}$的各种走法下reward的平均值,用它来替换G',而它的值,就是当前的reward加上t+1时刻的V:
- $r_t + V^\theta(S_{t+1}) - V^\theta(S_t)$
这就是:
Advantage Actor-Critic
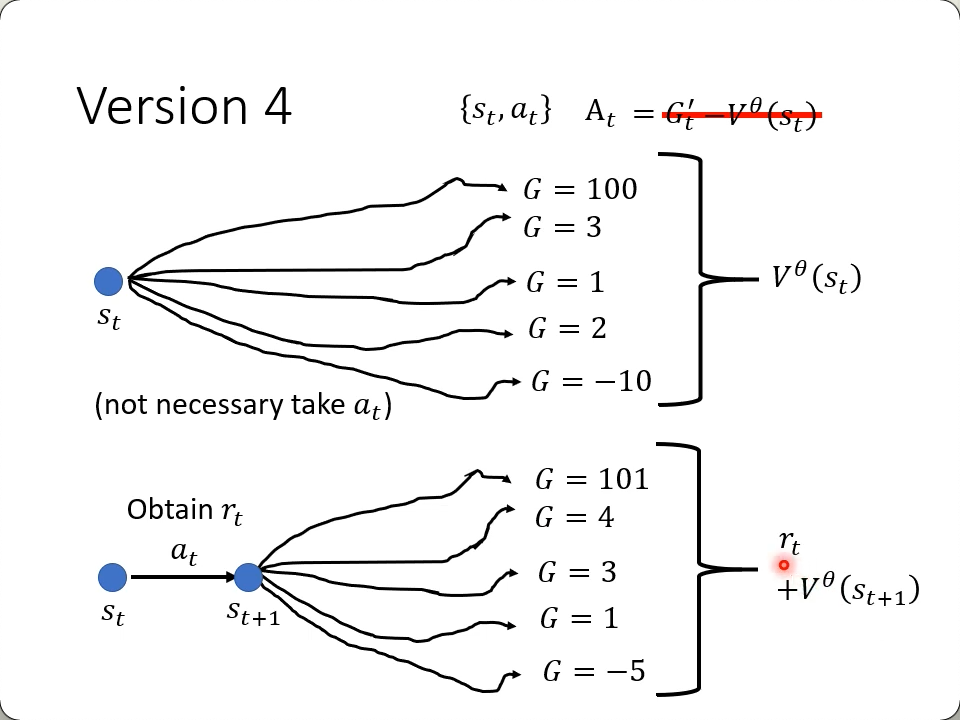
就看图而言,感觉就是坚持这一步走完,后续所有可能的rewawrd, 减去, 从这一步开始就试验所有走法的reward
More:
Deep Q Network (DQN)
Reward Shaping
前面说过很多场景要得到reward非常困难(时间长,步骤长,或根本不会结束),这样的情况叫sparse reward,人类可以利用一些已知知识去人为设置一些reward以增强或削弱机器的某些行为。
比如游戏:
- 原地不动一直慢慢减分
- 每多活一秒也慢慢减分(迫使你去获得更高的reward, 避免学到根本就不去战斗的方式)
- 每掉一次血也减分
- 每杀一个敌人就加分
- 以此类推,这样就不至于要等到一场比赛结束才有“一个”reward
又比如训练机械手把一块有洞的木板套到一根棍子上:
- 离棍子越近,就有一定的加分
- 其它有助于套进去的规则
还可以给机器加上好奇心,让机器看到有用的“新的东西”也加分。
No Reward, learn from demostration
只有游戏场景才会有明确的reward,大多数现实场景都是没有reward的,比如训练自动驾驶的车,或者太过死板的reward既不能适应变化,也容易被打出漏洞,比如机器人三定律里,机器人不能伤害人类,却没有禁止囚禁人类,又比如摆放盘子,却没有给出力度,等盘子摔碎了,再去补一条𢱨碎盘子就负reward的规则,也晚了,由此引入模仿学习:
Imitation Learning
略
Life-Long Learning
持续学习,机器学习到一个模型后,继续学下一个模型(任务)。
- 为什么不一个任务学一个模型
- 不可能去存储所有的模型
- 一个任务的知识不能转移到另一个任务
- 为什么不直接用迁移学习(迁移学习只关注迁移后的新任务)
Research Directions
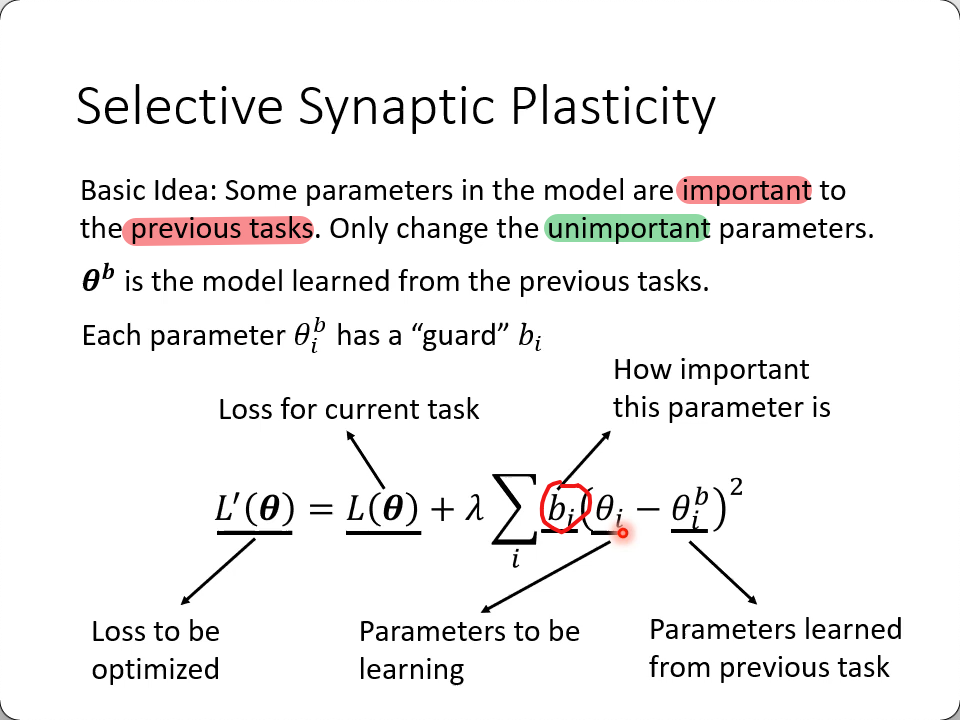
Selective Synaptic Plasticity
选择性的神经突触的可塑性?(Regularization-based Approach)
Catastrophic Forgetting 灾难性的遗忘
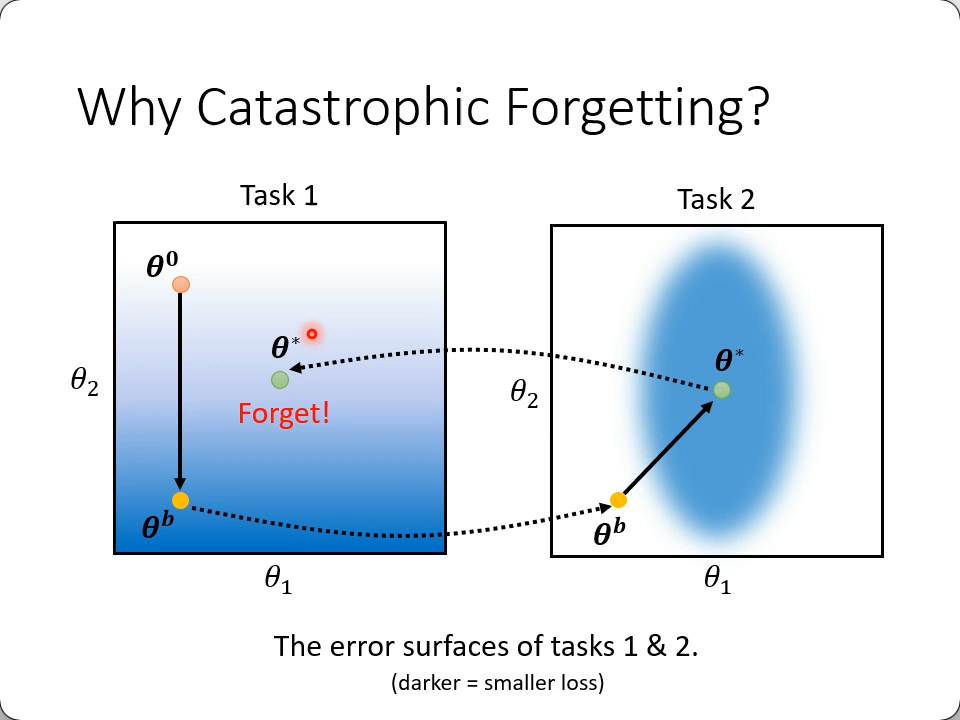
在任务1上学到的参数,到任务2里接着训练,顺着梯度到了任务2的最优参数,显然不再是任务1的做以参,这叫灾难性的遗忘
一种思路:
任务2里梯度要更新未必要往中心,也可以往中下方,这样既在任务2的低loss区域,也没有跑出任务1的低loss区域,实现的方式是找到对之前任务影响比较小的参数,主要去更新那些参数。比如上图中,显然$\theta_1$对任务1的loss影响越小,但是更新它之后会显著影响任务2的loss,而$\theta_2$的改动才是造成任务1loss变大的元凶。
Elastic Weight Consolidation(EWC)
Synaptic Intelligence(SI)
Memory Aware Synapses(MAS)
RWalk
Sliced Cramer Preservation(SCP)
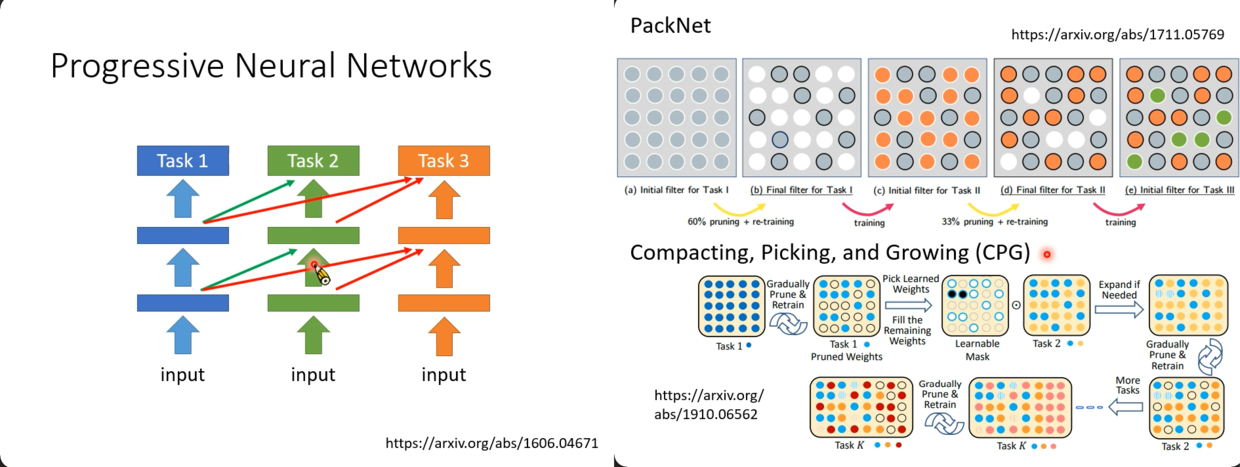
Memory Reply
- 在训练task1的时候,同时训练一个相应的generator
- 训练task2的时候,用task1的generator生成pseudo-data,一起来训练生成新的model
- 同时也训练出一个task1&2的generator
- ...
Network Compress
pruning (剪枝)
Networks ar typically over-parameterized (there is significant redundant weights or neurons)
- 可以看哪些参数通常比较大,或值的变化不影响loss(梯度小)-> 权重,为0的次数少 -> 神经元 等等
- 剪枝后精度肯定是会下降的
- 需要接着fine-tune
- 一次不要prune to much
- 剪参数和剪神经元效果是不一样的
- 剪参数会影响矩阵运算,继而影响GPU加速
那么为什么不直接train一个小的network呢?
- 小的network通常很难train到同样的准确率。 (大乐透假说)
Knowledge Distillation (知识蒸馏)
老师模型训练出来的结果,用学生模型(小模型)去模拟(即是模拟整个输出,而不是模拟分类结果),让小模型能达到大模型同样的结果。
一般还会在输出的softmax里面加上温度参数(即平滑输出,不同大小的数除一个大于1的数,显然越大被缩小的倍数也越大,比如100/10=10,少了90,10/10=1, 只少了9,差别也从90变成了9)(或者兴趣个极端的例子,T取无穷大,那么每个输出就基本相等了)
Parameter Quantization
- Using less bits to represent a value
- Weight clustering
- 把weights分成预先确定好的簇(或根据分布来确定)
- 对每簇取均值,用均值代替整个簇里所有的值
- represent frequent clusters by less bits, represent rare clusters by more bits
- Huffman encoding
极限,Binary Weights,用两个bits来描述整个网络,扩展阅读。
Depthwise Separable Convolution
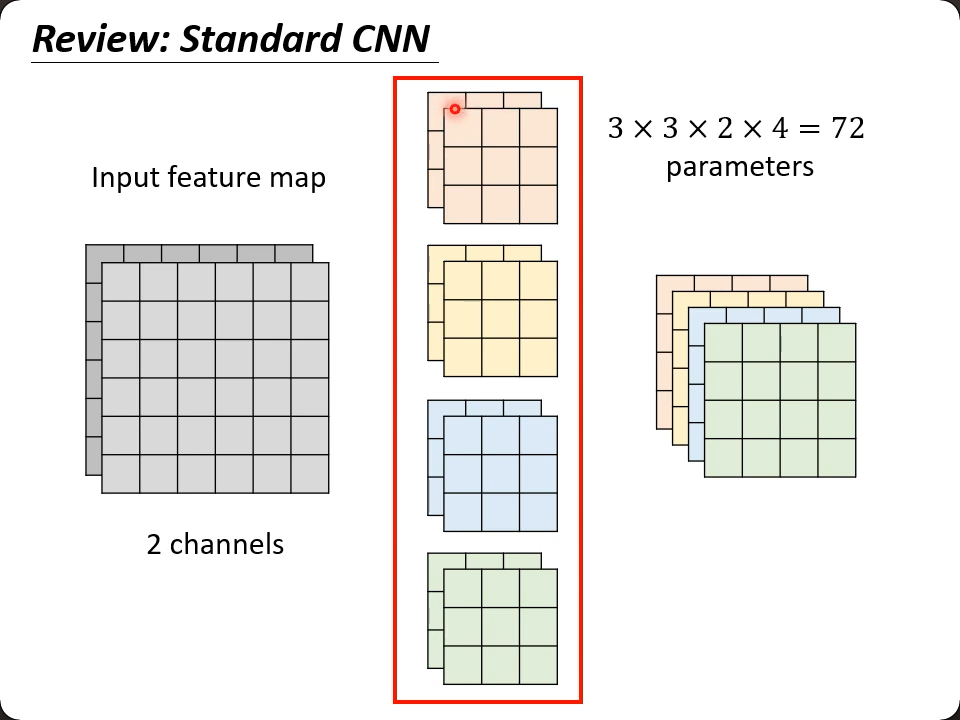
回顾下CNN的机制,参数量是:
- 卷积核的大小 x 输入图像的通道数 x 输出的通道数
- ($k\times k$) x in_channel x out_channel
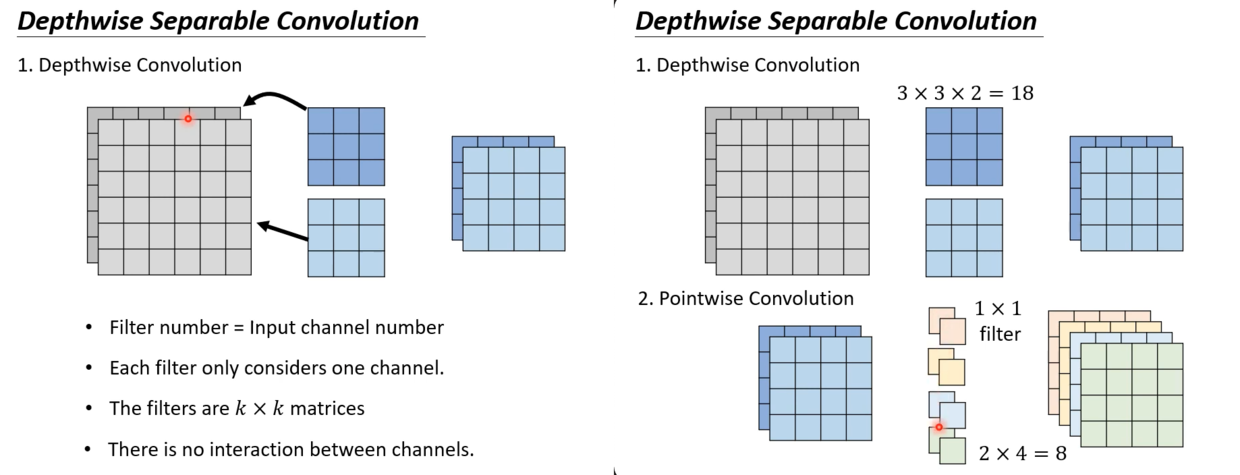
而Depthwise Separable Convolution由两个卷积组成:
- Depthwise Convolution
- 很多人对CNN的误解刚好就是Depthwise Convolution的样子,即一个卷积核对应一个输入的channel(事实上是一组卷积核对应所有的输入channel)
- 因此它的参数个数 k x k x in_channel
- PointWise Convolution
- 这里是为了补上通道与通道这间的关系
- 于是用了一个1x1的
标准卷积(即每一组卷积核对应输入的所有通道) - 输出channel也由这次卷积决定
- 应用标准卷积参数量:(1x1) x in_channel x out_channel
两个参数量做对比, 设in_channel = I, out_channel = O
- $p_1 = (k\times k) \times I \times O$
- $p_2 = (k\times k) \times I + (1\times 1) \times I \times O = (k\times k) \times I + I \times O$
- $\frac{p_2}{p_1} = \frac{I\cdot(k^2 + O)}{I\cdot{k^2\cdot O}}
= \frac{1}{O} + \frac{1}{k^2} \approx \frac{1}{k^2} $
O代表out_channel,大型网络里256,512比比皆是,所以它可以忽略,那么前后参数量就由$k^2$决定了,如果是大小为3的卷积核,参数量就变成1/9了,已经是压缩得很可观了。
Low rank approximation
上面是应用,原理就是Low rank approximation
以全连接网络举例
- 如果一个一层的网络,输入
N, 输出M,参数为W,那么参数量是MxN - 中间插入一个线性层
K,- 参数变成:
V:N->K,U:K->M, - 参数量:
NxK+KxM
- 参数变成:
- 只要K远小于M和N(比如数量级都不一致),那么参数量是比直接MxN要小很多的
- 这也限制了能够学习的参数的可能性(毕竟原始参数量怎么取都行)
- 所以叫
Low rankapproximation
- 所以叫
to learn more
SqueezeNet
MobileNet
ShuffleNet
Xception
GhostNet
Dynamic Computation
- 同一个网络,自己来决定计算量,比如是在不同的设备上,又或者是在同设备的不同时期(比如闲时和忙时,比如电量充足和虚电时)
- 为什么不为不同的场景准备不同的model呢?
- 反而需要更大的存储空间,与问题起源(资源瓶颈)冲突了。
Dynamic Depth
在部分layer之后,每一层都插一个额外的layer,提前做预测和输出,由调用者根据具体情况决定需要多深的depth来产生输出。
训练的时候既要考虑网络终点的loss,还要考虑所有提前结束的layer的softmax结果,加到一起算个大的Loss
Multi-Scale Dense Network(MSDNet)
Dynamic Width
训练的时候(同时?)对不同宽度(即神经元个数,或filter个数)进行计算(全部深度),也是把每种宽度最后产生的loss加起来当作总的Loss
在保留的宽度里,参数是一样的(所以应该就是同一轮训练里的参数了)
Slimmable Neural Networks
Computation based on Sample Difficulty
上述决定采用什么样的network/model的是人工决定的,那么有没有让机器自己决定采用什么网络的呢?
比如一张简单的图片,几层或一层网张就能得到结果,而另一张可能前景和或背景更复杂的图片,需要很多层才能最终把特征提取出来,应用同一个模型的话就有点资源浪费了。
- SkipNet: Learning Dynamic Routing in Convolutional Networks
- Runtime Neural Pruning
- BlockDrop: Dynamic Inference Paths in Residual Networks
Meta Learning
- 学习的学习。
- 之前的machine learning,输出是明确的任务,比如是一个数字,还是一个分类;而meta-learning,输出是一个model/network,用这个model,可以去做machine learning的任务。
- 它就相当于一个“返函数的函数”
- meta-learning 就是让机器学会去架构一个网络,初始化,学习率等等 $\leftarrow \varPhi$:
learnable components- categorize meta learning based on what is learnable
不再深入